Mạng đồng bộ tốc độ cao SSCNETIII / H
(Lưu ý): SSCNET (Mạng điều khiển hệ thống Servo)
- Tốc độ truyền thông được tăng lên 150 Mbps song công (tương đương 300 Mbps bán song công), nhanh hơn ba lần so với tốc độ thông thường.
Phản ứng của hệ thống được cải thiện đáng kể.
- Có thể kiểm soát trơn tru máy bằng cách sử dụng truyền thông nối tiếp tốc độ cao với thời gian chu kỳ là 0,222 ms.
- Giao tiếp đồng bộ đạt được với SSCNETIII / H, mang lại lợi thế kỹ thuật cho các máy yêu cầu điều khiển xác định.
- Có thể đi dây khoảng cách xa lên đến 3200 m (10498,69 ft.) Cho mỗi hệ thống (tối đa 100 m (328,08 ft.) Giữa các trạm x trục điều khiển lên đến 32 trục), thích hợp cho các hệ thống quy mô lớn.
- Bộ khuếch đại servo tương thích SSCNETIII / H và SSCNETIII có thể được sử dụng cùng nhau.
(Tốc độ truyền thông khi các sản phẩm tương thích SSCNETIII được sử dụng cùng nhau trong cùng một hệ thống: 150 Mbps full duplex)
Giao tiếp xác định và đồng bộ hóa
Giao tiếp hoàn toàn xác định và đồng bộ đạt được với SSCNETIII / H, mang lại lợi thế kỹ thuật trong các máy như máy in và chế biến thực phẩm đòi hỏi độ chính xác đồng bộ.
Kiểm soát trung tâm với mạng
Một lượng lớn dữ liệu servo được trao đổi trong thời gian thực giữa bộ điều khiển và bộ khuếch đại servo. Sử dụng MELSOFT MR Configurator2 trên máy tính cá nhân được kết nối với mô-đun Chuyển động Đơn giản QD77MS giúp hợp nhất thông tin như cài đặt tham số và giám sát cho nhiều bộ khuếch đại servo.
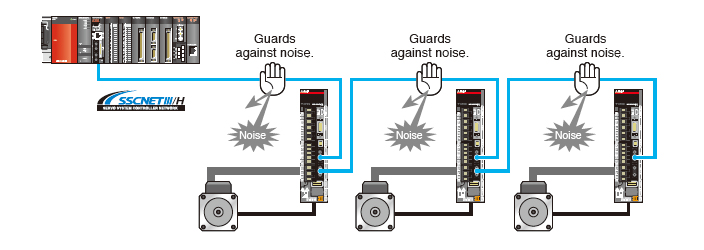
Không có va chạm truyền
Cáp quang loại bỏ triệt để tiếng ồn xâm nhập từ cáp nguồn hoặc các thiết bị bên ngoài.
Khả năng chịu tiếng ồn được cải thiện đáng kể so với cáp kim loại.
Kiểm soát vị trí
Thực hiện điều khiển định vị với phương pháp bảng dữ liệu.
- Chức năng Hỗ trợ cài đặt dữ liệu đơn giản hóa cài đặt.
- Dữ liệu định vị có thể được thiết lập rất đơn giản bằng cách sử dụng các chức năng như Tính toán tốc độ lệnh tự động, Mô phỏng ngoại tuyến và tính toán tự động cung phụ, v.v.
Kiểm soát đồng bộ
Điều khiển đồng bộ có thể dễ dàng đạt được bằng phần mềm bằng cách đặt các mô-đun cơ khí trên màn hình, chẳng hạn như bánh răng, trục, bánh răng thay đổi tốc độ và cam.
- Điều khiển đồng bộ được thực hiện dễ dàng với các cài đặt tham số. Không cần thiết phải tạo các chương trình phức tạp.
- Điều khiển đồng bộ được khởi động / dừng trên cơ sở từng trục. Trục điều khiển đồng bộ và trục điều khiển định vị có thể tồn tại cùng nhau trong một chương trình.
- Lượng chuyển động của trục chính được truyền đến trục đầu ra thông qua ly hợp.
Cam điều khiển
Có thể dễ dàng tạo ra nhiều mẫu cam khác nhau.
- Điều khiển cam đã trở nên linh hoạt hơn. Có nhiều mẫu cam khác nhau.
- Bạn có thể thiết lập hành trình, tốc độ, gia tốc và tốc độ đồng thời kiểm tra cấu hình trên biểu đồ.
- Dữ liệu cam được tạo dễ dàng được xem dưới dạng hình thu nhỏ.
- Dữ liệu Cam được nhập và xuất ở định dạng CSV.
Kiểm soát dòng chảy
Việc bắt đầu hoạt động định vị bởi mô-đun Chuyển động Đơn giản được lập trình trong CPU PLC.
Mô-đun Chuyển động Đơn giản bắt đầu hoạt động từ Số dữ liệu định vị được chỉ định và tiếp tục hoạt động cho đến khi kết thúc kiểu hoạt động.
Khả năng tương thích cao với các kiểu máy trước đó
Các dự án và chương trình tuần tự của mô-đun Định vị (QD75MH) dễ dàng được chuyển hướng sang mô-đun Chuyển động Đơn giản (QD77MS / LD77MS).
Việc thay thế cho QD77MS / LD77MS dễ dàng hoàn thành mà không cần thay thế mẫu trước của bộ khuếch đại servo MR-J3-B.
Danh sách chức năng
| |
Mô-đun chuyển động đơn giản |
| QD77MS16 |
QD77MS4 |
QD77MS2 |
| Phương thức kết nối bộ khuếch đại servo |
SSCNETIII / H (150Mbps) |
| Khoảng cách tối đa giữa các trạm [m (ft.)] |
100 (328,08) |
| Bộ khuếch đại servo có thể kết nối |
MR-J4 (W) -B |
| Số lượng trục điều khiển |
16 trục |
4 trục |
2 trục |
| Chu kỳ hoạt động |
0,88 / 1,77 |
Từ 0,88 |
| Môi trường kỹ thuật |
Công cụ thiết lập mô-đun chuyển động đơn giản (Lưu ý-1) Bộ cấu hình MR2 |
| Chế độ điều khiển |
Điều khiển PTP (Điểm đến điểm), Điều khiển vị trí, Điều khiển tốc độ, Điều khiển mô-men xoắn, Điều khiển
siết & vừa vặn, Điều khiển cam, Điều khiển đồng bộ nâng cao,
2 trục / 3 trục / 4 trục Nội suy tuyến tính, 2 trục Nội suy tròn, Điều khiển quỹ đạo,
Điều khiển chuyển đổi tốc độ / vị trí (ABS / INC), Điều khiển chuyển đổi vị trí / tốc độ (INC) |
| Đơn vị điều khiển |
mm, inch, độ, PLS |
| Định vị dữ liệu |
600 dữ liệu (dữ liệu định vị từ số 1 đến 600) / trục
(Có thể được đặt bằng MELSOFT GX Works2 hoặc chương trình Trình tự.) |
| Phương pháp tăng tốc / giảm tốc |
Tăng / giảm tốc hình thang, tăng / giảm tốc đường cong S |
| Điều khiển bằng tay |
Vận hành JOG, Vận hành bộ tạo xung thủ công, Vận hành theo inch |
| Các chức năng thay đổi chi tiết điều khiển |
Thay đổi giá trị hiện tại, Chức năng thay đổi vị trí mục tiêu, Chức năng thay đổi mô-men xoắn, Chức năng thay đổi tốc độ,
Chức năng ghi đè, Chức năng thay đổi thời gian tăng / giảm tốc |
| Phương thức trả về vị trí chính |
Phương pháp chó điểm gần, Phương pháp đếm 1, Phương pháp đếm 2, Phương pháp tập dữ liệu,
Phương pháp phát hiện tín hiệu vị trí nhà theo tỷ lệ |
| Chức năng phụ trợ |
Chức năng dừng cưỡng bức, Chức năng giới hạn hành trình phần cứng, Chức năng giới hạn hành trình phần mềm, Hệ thống vị trí tuyệt đối,
Chức năng hoạt động không có bộ khuếch đại, Nguồn cấp độ dài không giới hạn, Chức năng theo dõi dữ liệu tùy chọn,
Chức năng phát hiện dấu hiệu, Sao lưu flash ROM, Chức năng thu thập lỗi mô-đun, Đầu ra mã M chức năng, chức năng
máy hiện sóng kỹ thuật số , chức năng tự động tạo cam |
| Số điểm I / O chiếm giữ |
32 điểm (Phân bổ I / O: Mô-đun chức năng thông minh, 32 điểm) |
| Tiêu thụ dòng điện bên trong 5VDC [A] |
0,75 |
0,6 |
0,6 |
| Khối lượng [kg] |
0,16 |
0,16 |
0,15 |
(Lưu ý-1): Công cụ thiết lập mô-đun chuyển động đơn giản được bao gồm trong MELSOFT GX Works2.
- Cấu hình hệ thống-QD77MS
-
Cấu hình hệ thông
Số trục tối đa được điều khiển bởi một mô-đun: lên đến 16 trục (QD77MS4), lên đến 4 trục (QD77MS4), lên đến 2 trục (QD77MS2).
Các tài sản dự án hiện có của QD75MH có thể được chuyển hướng sang QD77MS.
-
- Tính năng-QD77GF
-

Mạng trường CC-Link IE
- Mạng Ethernet trường công nghiệp mới với tính linh hoạt cao cho phép các hệ thống sản xuất thông minh thực hiện đồng thời điều khiển I / O tốc độ cao và điều khiển Chuyển động.
- Việc bố trí hệ thống dây mạng có tính linh hoạt cao để phù hợp nhất với nhu cầu của ứng dụng. Chọn từ đường thẳng, hình sao hoặc đường hỗn hợp và cấu trúc liên kết hình sao.
- QD77GF có thể được sử dụng làm trạm chính của Mạng CC-Link IE Field Network và được kết nối với nhiều loại thiết bị, chẳng hạn như thiết bị I / O.
- Rút ngắn thời gian thao tác bằng cách sử dụng Mạng trường CC-Link IE 1Gbps.
- Dựa trên các tiêu chuẩn Ethernet, cáp và đầu nối được cung cấp rộng rãi trên khắp thế giới.
Giao tiếp xác định và đồng bộ
Chức năng nội suy và điều khiển đồng bộ đạt được nhờ giao tiếp đồng bộ của Mạng CC-Link IE Field Network, được áp dụng cho các máy cần điều khiển đồng bộ như máy móc thực phẩm và máy chế biến.
Cấu trúc liên kết mạng linh hoạt
Các cấu trúc liên kết hỗn hợp đường, sao và đường / sao có sẵn cho bố cục đi dây Mạng Trường CC-Link IE.
Cấu trúc liên kết hỗn hợp dòng / sao
Cấu trúc liên kết hình sao có sẵn bằng cách sử dụng HUB chuyển mạch công nghiệp.
HUB áp dụng: DT135TX (do Mitsubishi Electric System & Service Co., Ltd. sản xuất)
Tôpô đường thẳng
Các mô-đun Chuyển động Đơn giản (Trạm chính) có thể được kết nối với các thiết bị phụ mà không cần sử dụng HUB, giúp giảm chi phí.
Bộ khuếch đại Servo mạng trường CC-Link IE MR-J4-GF
- Có chức năng điều khiển ưu việt của dòng MR-J4, MR-J4-GF hỗ trợ mạng CC-Link IE Field.
- Cùng với mô-đun Chuyển động Đơn giản, điều khiển đồng bộ nâng cao và điều khiển nội suy được kích hoạt.
-
Kiểm soát vị trí
- Để đáp ứng các ứng dụng khác nhau, máy có thể được điều khiển bằng nhiều phương pháp điều khiển khác nhau như điều khiển nội suy tuyến tính, điều khiển nội suy tròn 2 trục, điều khiển tiến dao cố định và điều khiển quỹ đạo liên tục.
- Hoạt động tự động có thể được thực hiện bằng cách cài đặt địa chỉ và tốc độ định vị, v.v., thành một chương trình tuần tự.
- Có sẵn các chức năng phụ mạnh mẽ như mã M, chức năng bỏ qua, chức năng thay đổi tốc độ và chức năng thay đổi vị trí mục tiêu.
Điều khiển đồng bộ / Điều khiển cam
- Đạt được điều khiển đồng bộ và điều khiển cam bằng cách sử dụng xung đầu vào từ bộ mã hóa đồng bộ hoặc bộ khuếch đại servo ảo.
- Sử dụng bộ mã hóa đồng bộ gia tăng với giao diện tích hợp trực tiếp của QD77GF.
- Cải thiện hơn nữa độ chính xác đồng bộ hóa với chức năng bù pha, được thiết kế để bù cho độ trễ của bộ mã hóa đồng bộ.
-

Kiểm soát dòng chảy
Việc bắt đầu hoạt động định vị bởi mô-đun Chuyển động Đơn giản được lập trình trong CPU PLC.
Mô-đun Chuyển động Đơn giản bắt đầu hoạt động từ Số dữ liệu định vị được chỉ định và tiếp tục hoạt động cho đến khi kết thúc kiểu hoạt động.
Danh sách chức năng
| |
Mô-đun chuyển động đơn giản |
| QD77GF16 |
QD77GF8 |
QD77GF4 |
| Số lượng trục điều khiển |
16 trục |
8 trục |
4 trục |
| Phương thức kết nối bộ khuếch đại servo |
Trường CC-Link IE (1000Mbps) |
Khoảng cách tối đa
giữa các trạm [m (ft.)] |
100 (328,08) |
| Bộ khuếch đại servo có thể kết nối |
MR-J4-GF , MR-J4-GF-RJ |
| Chu kỳ hoạt động |
1.0, 2.0, 4.0 |
| Môi trường kỹ thuật |
Công cụ thiết lập mô-đun chuyển động đơn giản (Lưu ý-1) Bộ cấu hình MR2 |
| Chế độ điều khiển |
Điều khiển PTP (Điểm đến điểm), Điều khiển vị trí, Điều khiển cam, điều khiển đồng bộ,
2 trục / 3 trục / 4 trục Nội suy tuyến tính, 2 trục Nội suy tròn, Điều khiển quỹ đạo,
Điều khiển chuyển đổi tốc độ / vị trí (ABS / INC), Vị trí / tốc độ điều khiển chuyển mạch (INC) |
| Đơn vị điều khiển |
mm, inch, độ, PLS |
| Định vị dữ liệu |
600 dữ liệu (dữ liệu định vị từ số 1 đến 600) / trục
(Có thể được đặt bằng MELSOFT GX Works2 hoặc chương trình Trình tự.) |
| Phương pháp tăng tốc / giảm tốc |
Tăng / giảm tốc hình thang, tăng / giảm tốc đường cong S |
| Điều khiển bằng tay |
Vận hành JOG, Vận hành bộ tạo xung thủ công, Vận hành theo inch |
| Các chức năng thay đổi chi tiết điều khiển |
Thay đổi giá trị hiện tại, Chức năng thay đổi vị trí mục tiêu, Chức năng thay đổi mô-men xoắn, Chức năng thay đổi tốc độ,
Chức năng ghi đè, Chức năng thay đổi thời gian tăng / giảm tốc |
| Phương thức trả về vị trí chính |
Phương thức OPR của trình điều khiển |
| Chức năng phụ trợ |
Chức năng dừng cưỡng bức, Chức năng giới hạn hành trình phần cứng, Chức năng giới hạn hành trình phần mềm, Hệ thống vị trí tuyệt đối, Chức năng hoạt động không bộ khuếch đại, Nguồn cấp độ dài không giới hạn, Chức năng phát hiện dấu, Sao lưu ROM Flash,
Chức năng đầu ra mã M, Chức năng thu thập lỗi mô-đun, Chức năng máy hiện sóng kỹ thuật số , Chức năng tự động tạo cam |
| Số điểm I / O chiếm giữ |
32 điểm (Phân bổ I / O: Mô-đun chức năng thông minh, 32 điểm) |
| Tiêu thụ dòng điện bên trong 5VDC [A] |
0,8 |
| Khối lượng [kg] |
0,26 |
(Lưu ý-1): Công cụ thiết lập mô-đun chuyển động đơn giản được bao gồm trong MELSOFT GX Works2.
- Cấu hình hệ thống-QD77GF
-
Cấu hình hệ thống
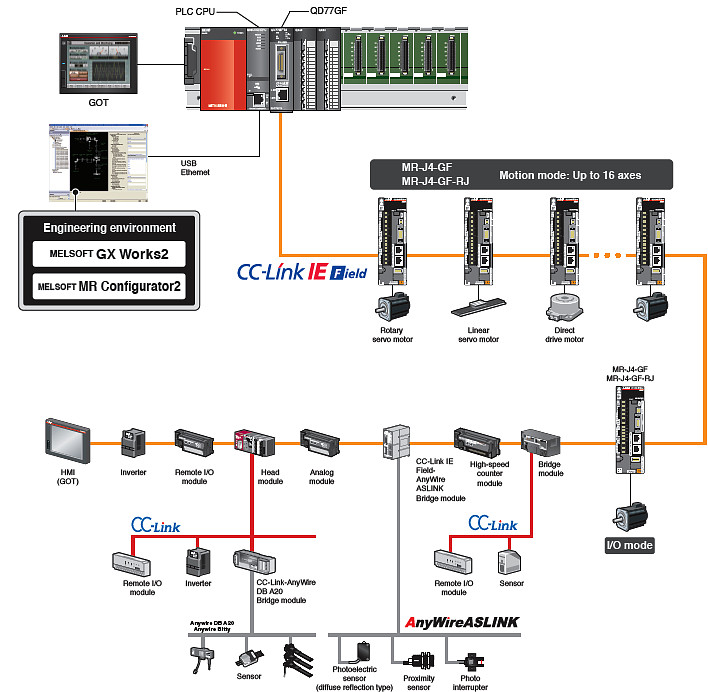
Trạm nô lệ: Lên đến 120 trạm (16 bộ khuếch đại servo tương thích chế độ chuyển động + 104 thiết bị I / O)
(Lưu ý): Cần có một trung tâm chuyển mạch cho cấu trúc liên kết hình sao.