Ý tưởng
Đặc trưng
Được kết hợp với bộ khuếch đại servo TSN tương thích CC-Link IE, mô-đun Chuyển động cung cấp hệ thống servo hiệu suất cao giúp cải thiện khả năng của máy.
- Thực hiện điều khiển chuyển động nâng cao, chẳng hạn như điều khiển định vị, đồng bộ, cam và tốc độ-mô-men xoắn.
- Kết nối các mô-đun I / O từ xa và bộ biến tần FR-A800-GN qua CC-Link IE TSN. Dữ liệu của các thiết bị này có thể được đọc / ghi bởi một mô-đun CPU.
- Kết nối các thiết bị TCP / IP, cho phép cấu hình hệ thống linh hoạt.
- Có thể sử dụng lại các dự án hiện có của mô-đun Chuyển động Đơn giản dòng MELSEC iQ-F (mẫu trước đó).
Mô-đun Chuyển động cho phép điều khiển chuyển động nâng cao đồng thời mang lại hiệu quả về chi phí.
Mô-đun có khả năng và chức năng cần thiết cho các hệ thống độc lập / quy mô nhỏ.
FX5-40SSC-G 
FX5-80SSC-G
- Số trục điều khiển tối đa:
4 trục / mô-đun (FX5-40SSC-G), 8 trục / mô-đun (FX5-80SSC-G)
- Chu kỳ hoạt động tối thiểu * 1 : 500 [μs]
- Số lượng mô-đun được kết nối tối đa * 2 : 4 mô-đun / hệ thống
- * 1. Chu kỳ hoạt động thay đổi tùy theo số lượng trục điều khiển và kiểu máy.
- * 2. Điều này đề cập đến tổng số mô-đun Chuyển động và một FX5-CCLGN-MS (trạm chính).
Di sản (Tái sử dụng các dự án hiện có)
Có thể sử dụng lại các dự án hiện có của mô-đun Chuyển động Đơn giản dòng MELSEC iQ-F (mẫu trước đó). Điều này cho phép giảm thời gian phát triển chương trình.
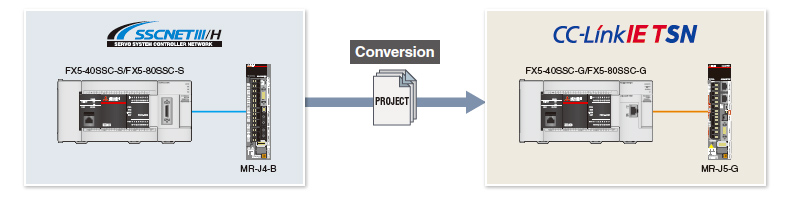
- * Cần có cài đặt thông số cho mạng và bộ khuếch đại servo.
Kiểm soát vị trí
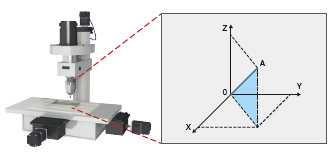
Mô-đun Chuyển động thực hiện các điều khiển định vị khác nhau, chẳng hạn như điều khiển quỹ đạo kết hợp nội suy tuyến tính và vòng tròn và chuyển đổi vị trí tốc độ.
Phép nội suy tuyến tính
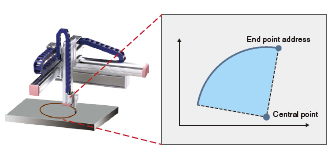
Nội suy vòng tròn
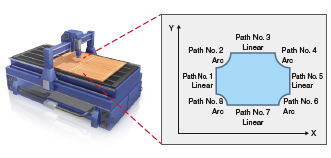
Kiểm soát quỹ đạo
Chuyển đổi vị trí tốc độ
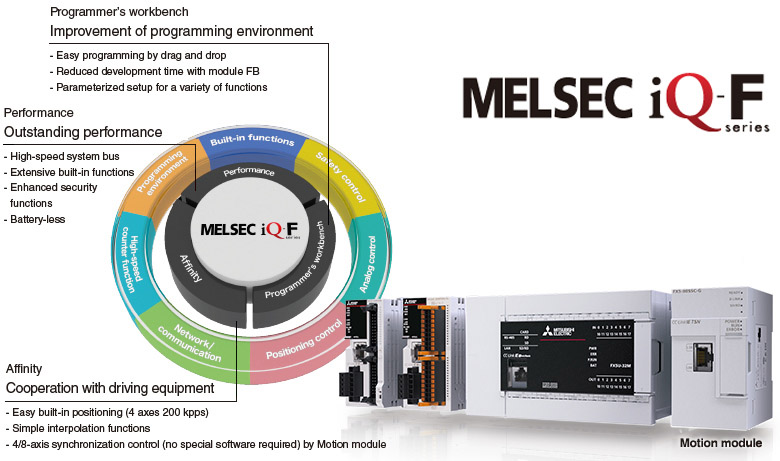
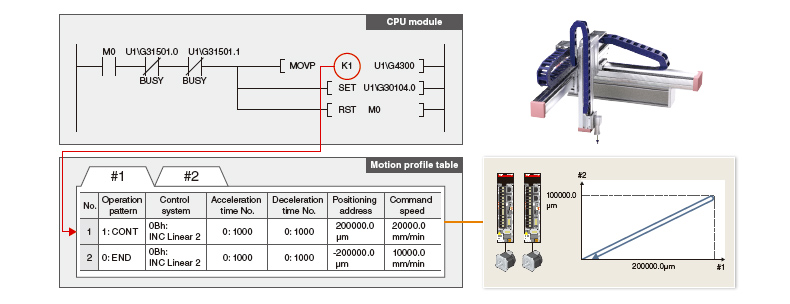
Lập trình
Mô-đun Chuyển động dễ dàng thực hiện hoạt động định vị với lệnh trong một chương trình tuần tự bắt đầu dữ liệu định vị của bảng cấu hình chuyển động. Để đáp ứng các nhu cầu ứng dụng khác nhau, mô-đun Chuyển động cung cấp nhiều loại điều khiển khác nhau, chẳng hạn như nội suy cung tròn tuyến tính / hai trục, nguồn cấp dữ liệu cố định và điều khiển quỹ đạo.
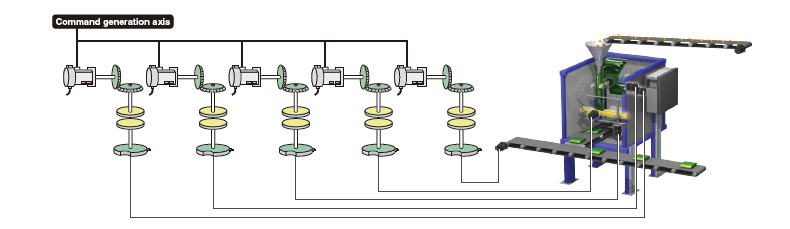
Kiểm soát đồng bộ
Điều khiển đồng bộ có thể đạt được bằng cách sử dụng phần mềm thay vì điều khiển cơ học với bánh răng, trục, ly hợp, hộp số thay đổi tốc độ hoặc cam, v.v.
- Điều khiển đồng bộ có thể được khởi động / kết thúc linh hoạt cho từng trục, cho phép trục điều khiển đồng bộ và trục điều khiển định vị được sử dụng trong cùng một chương trình.
- Trục tạo lệnh, trục đầu vào servo hoặc trục bộ mã hóa đồng bộ có thể được đặt làm trục đầu vào.
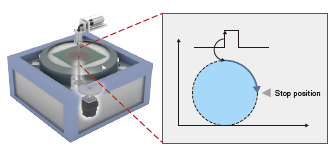
- Trục đầu ra được vận hành với một cam. Ba hoạt động sau có thể được thực hiện với các chức năng của cam: hoạt động tuyến tính, hoạt động hai chiều và hoạt động nạp liệu.
- Bộ mã hóa đồng bộ gia tăng * 1 có thể được kết nối qua bộ khuếch đại servo MR-J5-G (-RJ) / MR-J5W2-G.
- * 1. Khi định cấu hình hệ thống định vị tuyệt đối, hãy sử dụng bộ mã hóa động cơ servo dòng HK.
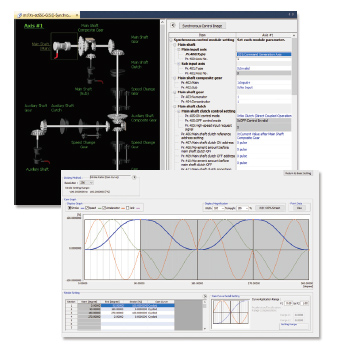
Cài đặt tham số
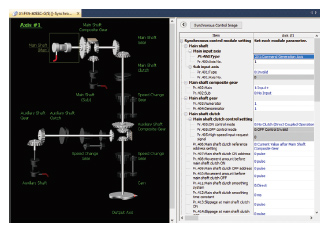
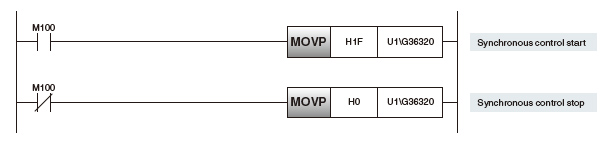
Điều khiển đồng bộ được thực hiện bằng cách cài đặt các thông số của trục đầu vào, trục đầu ra, bánh răng và ly hợp để điều khiển đồng bộ và bật tín hiệu khởi động điều khiển đồng bộ.
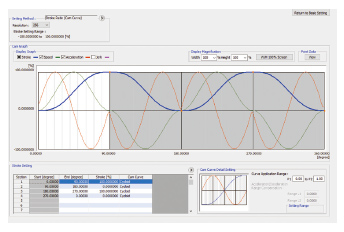
Biểu đồ cam có thể được tạo ra một cách linh hoạt và dễ dàng thông qua thao tác kéo và thả. Dạng sóng được thay đổi theo chuyển động của con trỏ.
Băt đâu dưng
Điều khiển đồng bộ có thể được thực hiện sau khi các tham số đồng bộ được thiết lập cho mỗi trục đầu ra. Khi tín hiệu khởi động điều khiển đồng bộ được bật, các tham số điều khiển đồng bộ được phân tích và trạng thái được thay đổi thành trong quá trình điều khiển đồng bộ.
Trục đầu ra được vận hành bởi các lệnh được truyền từ trục đầu vào.
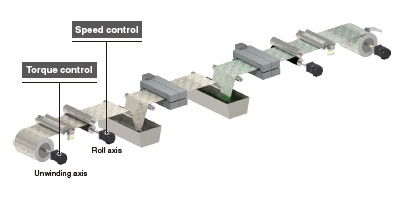
Kiểm soát tốc độ-mô-men xoắn
Kiểm soát tốc độ / Kiểm soát mô-men xoắn
Các trục trong điều khiển tốc độ được điều khiển để chạy ở tốc độ không đổi theo lệnh tốc độ và các trục trong điều khiển mô-men xoắn ở mô-men xoắn không đổi theo lệnh mô-men xoắn.
Mô-đun Chuyển động có thể được sử dụng cho ứng dụng kiểm soát lực căng, chẳng hạn như cuộn hoặc tua lại.
Ngoài ra, các vị trí hiện tại luôn được theo dõi ngay cả trong điều khiển tốc độ và mô-men xoắn, do đó việc định vị được thực hiện trơn tru phù hợp với tọa độ vị trí tuyệt đối trong điều khiển vị trí sau khi chuyển từ điều khiển tốc độ và mô-men xoắn.
Hoạt động liên tục để kiểm soát mô-men xoắn
Khi sử dụng điều khiển này, bạn có thể chuyển đổi liên tục từ điều khiển vị trí sang điều khiển mô-men xoắn mà không cần dừng động cơ servo.
- Các vị trí hiện tại luôn được theo dõi ngay cả trong điều khiển mô-men xoắn, và do đó việc định vị được thực hiện trơn tru trong điều khiển vị trí sau khi chuyển từ điều khiển mô-men xoắn.
- Điều khiển vị trí được chuyển sang điều khiển mô-men xoắn một cách trơn tru mà không cần dừng động cơ servo.
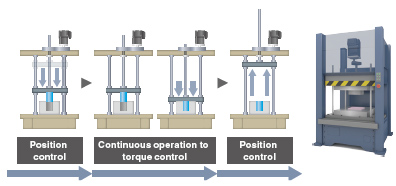
[Một ví dụ về hoạt động liên tục để kiểm soát mô-men xoắn]
Điều khiển này có thể áp dụng cho nhiều loại máy khác nhau, chẳng hạn như máy liên kết, máy dập, máy đột lỗ và máy kẹp.

Các tính năng phụ trợ
Bộ khuếch đại Servo ảo
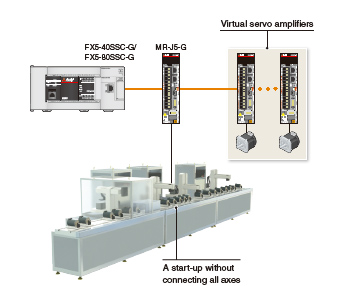
Chức năng bộ khuếch đại servo ảo cho phép các hoạt động của bộ khuếch đại servo ảo như thể một thiết bị thực được kết nối.
Khi bộ khuếch đại servo ảo được đặt làm trục đầu vào servo của điều khiển đồng bộ, mô-đun Chuyển động thực hiện điều khiển đồng bộ với các lệnh đầu vào được tạo ảo.
Ngoài ra, chức năng này được sử dụng để mô phỏng một trục mà không có kết nối thực tế.
Trả lại tự động
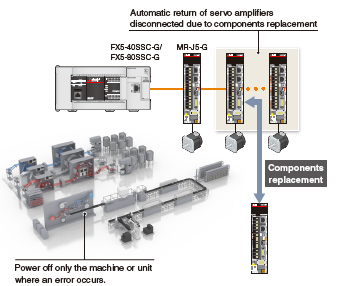
Khi các trạm phụ trở lại trạng thái bình thường sau khi bị ngắt kết nối do lỗi liên kết dữ liệu, chức năng này sẽ tự động trả các trạm bị ngắt kết nối về mạng và khởi động lại liên kết dữ liệu.
Khi các thành phần bị lỗi cần được thay thế ở một trong các máy trong dây chuyền sản xuất hoặc một trong các bộ phận trong máy, chỉ có thể tắt một phần máy hoặc bộ phận mà không cần tắt nguồn toàn bộ hệ thống.
Hoạt động không dùng pin
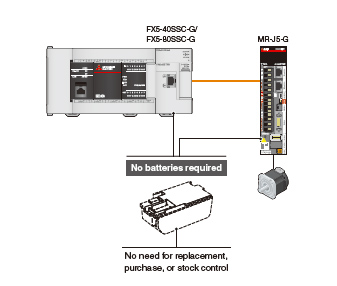
Mô-đun Chuyển động và bộ khuếch đại servo có thể hoạt động mà không cần pin. * 1
Chi phí bảo trì giảm do loại bỏ việc thay thế pin và kiểm soát kho.
- * 1. Động cơ truyền động trực tiếp có thể yêu cầu pin.
Đánh dấu phát hiện
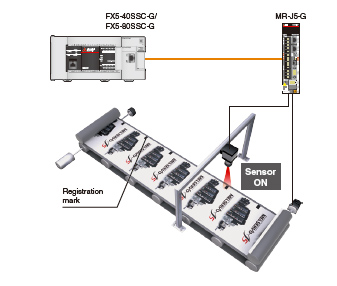
Chức năng này chốt dữ liệu phản hồi với đầu vào tín hiệu kích hoạt tới bộ khuếch đại servo.
Số tiền bồi thường được tính toán dựa trên dữ liệu đã chốt và lỗi được bù bằng trục bù.
Môi trường kỹ thuật
MELSOFT GX Works3
MELSOFT GX Works3 có nhiều tính năng giúp người dùng tạo dự án và tiến hành bảo trì linh hoạt và dễ dàng hơn.
Phần mềm kỹ thuật đa dạng của chúng tôi (GX Works3, phần mềm định cỡ và phần mềm lựa chọn mô hình, v.v.) bao gồm đầy đủ tất cả các giai đoạn của quy trình phát triển từ cài đặt thông số đến bảo trì mô-đun chuyển động, bộ khuếch đại servo và động cơ servo.




Thiết kế hệ thống
- Cấu hình mô-đun
- Cấu hình mạng
- Cài đặt dữ liệu cho bộ khuếch đại servo
- Cài đặt cho I / O từ xa
Lập trình (Định vị)
- Lập trình với Ladder, SFC, FBD / LD
- Cài đặt dữ liệu định vị
- Mô phỏng ngoại tuyến, tính toán tự động tốc độ lệnh
Lập trình (Điều khiển đồng bộ)
- Tham số điều khiển đồng bộ
- Tạo dữ liệu cam, danh sách dữ liệu cam
Gỡ lỗi / Bảo trì
- Sự kiện lịch sử
- Lịch sử giá trị hiện tại, lịch sử bắt đầu, màn hình trục
- Màn hình Servo
- Máy hiện sóng kỹ thuật số
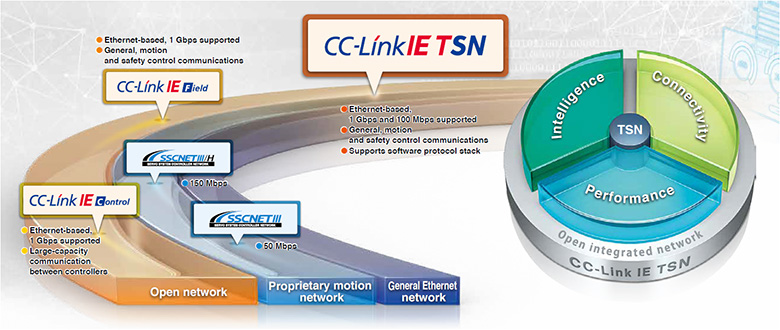
Mở mạng tích hợp trên toàn bộ doanh nghiệp sản xuất
CC-Link IE TSN hỗ trợ giao tiếp TCP / IP và áp dụng nó cho các kiến trúc công nghiệp thông qua sự hỗ trợ của TSN cho phép giao tiếp thời gian thực.
Với kiến trúc hệ thống linh hoạt và các tính năng thiết lập và khắc phục sự cố mở rộng làm cho CC-Link IE TSN trở nên lý tưởng để xây dựng cơ sở hạ tầng IIoT trong toàn doanh nghiệp sản xuất.
- * TSN: Mạng nhạy cảm với thời gian
- * IIoT: Internet vạn vật công nghiệp
Thêm chi tiết

Bộ khuếch đại Servo MR-J5 (W) -G

Bộ khuếch đại servo hiệu suất cao, hàng đầu trong ngành MELSERVO-J5 có động cơ điều khiển độc đáo mạnh mẽ hơn bao giờ hết.
Các bộ khuếch đại servo này có thể kết nối với CC-Link IE TSN để thực hiện điều khiển tốc độ cao, độ chính xác cao.
Mỗi bộ khuếch đại servo nhiều trục điều khiển tối đa hai hoặc ba động cơ servo (tùy thuộc vào kiểu bộ khuếch đại servo được chọn), đơn giản hóa việc đấu dây và cho phép một máy nhỏ gọn với chi phí thấp hơn.
Thêm chi tiết
Danh sách chức năng
| |
Mô-đun chuyển động |
| FX5-40SSC-G |
FX5-80SSC-G |
| Số trục điều khiển tối đa |
4 trục |
8 trục |
Chu kỳ
hoạt động (cài đặt chu kỳ hoạt động) [μs] |
500, 1000, 2000, 4000 |
| Hàm nội suy |
Nội suy tuyến tính (lên đến 4 trục), nội suy tròn 2 trục |
| Phương pháp điều khiển |
Điều khiển vị trí, điều khiển quỹ đạo (tuyến tính và vòng cung), điều khiển tốc độ, điều khiển tốc độ-mô-men xoắn,
điều khiển đồng bộ, hoạt động liên tục đến điều khiển mô-men xoắn |
| Chức năng bồi thường |
Bù trừ phản ứng dữ dội, bánh răng điện tử, chức năng chuyền gần |
| Điều khiển đồng bộ |
Đầu vào bộ mã hóa đồng bộ, trục tạo lệnh, cam, bù pha, tự động tạo cam |
| Điều khiển cam |
Số lượng đăng ký cam * 1 |
Lên đến 128 |
| Dữ liệu cam |
Định dạng dữ liệu tỷ lệ đột quỵ, định dạng dữ liệu tọa độ |
| Cam tự động tạo |
Cam tự động tạo cho dao quay |
| Phương pháp kiểm soát vị trí |
Bảng hồ sơ chuyển động |
| Đơn vị điều khiển |
mm, inch, độ, xung |
| Số lượng dữ liệu định vị |
600 dữ liệu (dữ liệu định vị từ số 1 đến 600) / trục
(Có thể được thiết lập bằng MELSOFT GX Works3 hoặc một chương trình tuần tự.) |
| Sao lưu |
Các thông số, dữ liệu định vị và dữ liệu bắt đầu khối có thể được lưu trên ROM flash (sao lưu không cần pin) |
| Trở lại vị trí nhà |
Người lái xe trở về vị trí nhà * 2 |
| Kiểm soát vị trí |
Điều khiển nội suy tuyến tính (Lên đến 4 trục * 3 (tốc độ vectơ, tốc độ trục tham chiếu)),
điều khiển tiến dao cố định (lên đến 4 trục), nội suy tròn 2 trục (chỉ định điểm phụ, chỉ định
điểm trung tâm), tốc độ điều khiển (lên đến 4 trục), điều khiển chuyển đổi vị trí tốc độ (chế độ INC, chế độ
ABS), điều khiển chuyển đổi tốc độ vị trí (chế độ INC), thay đổi giá trị hiện tại (dữ liệu định vị,
số bắt đầu thay đổi giá trị hiện tại)
Lệnh NOP, Lệnh JUMP (có điều kiện, không điều kiện), LOOP, LEND,
điều khiển định vị mức cao (khởi động khối, bắt đầu điều kiện, bắt đầu chờ, bắt đầu đồng thời, bắt đầu lặp lại) |
| Điều khiển bằng tay |
Hoạt động JOG, hoạt động nhích, vận hành bộ tạo xung thủ công (lên đến 1 mô-đun (tăng dần),
độ phóng đại đơn vị (1 đến 10000 lần), thông qua CPU (bộ nhớ đệm)) |
| Kiểm soát tốc độ-mô-men xoắn |
Kiểm soát tốc độ không bao gồm vòng lặp vị trí, kiểm soát mô-men xoắn, hoạt động liên tục để kiểm soát mô-men xoắn |
| Hệ thống vị trí tuyệt đối |
Đã cung cấp |
| Chức năng hoạt động bộ mã hóa đồng bộ |
Lên đến 4 mô-đun (thông qua CPU hoặc bộ khuếch đại servo) |
| Tốc độ giới hạn |
Giá trị giới hạn tốc độ, giá trị giới hạn tốc độ JOG |
| Chức năng giới hạn mô-men xoắn |
Cài đặt giá trị giới hạn mô-men xoắn giống nhau, cài đặt riêng giá trị giới hạn mô-men xoắn |
| Buộc dừng |
Qua bộ nhớ đệm, cài đặt hợp lệ / không hợp lệ |
| Chức năng giới hạn hành trình phần mềm |
Kiểm tra phạm vi di chuyển với giá trị dòng cấp hoặc với giá trị cấp máy |
| Chức năng giới hạn hành trình phần cứng |
Đã cung cấp |
| Thay đổi tốc độ |
Đã cung cấp |
| Ghi đè |
1 đến 300 [%] |
| Quá trình tăng tốc / giảm tốc thay đổi |
Thời gian tăng tốc / giảm tốc |
| Thay đổi giới hạn mô-men xoắn |
Đã cung cấp |
| Thay đổi vị trí mục tiêu |
Tốc độ đến địa chỉ vị trí mục tiêu và vị trí mục tiêu có thể thay đổi. |
| Chức năng đầu ra mã M |
Đã cung cấp |
Các
chức năng khác |
Bước chức năng |
Bước đơn vị giảm tốc, bước đơn vị số dữ liệu |
| Bỏ qua chức năng |
Qua CPU, qua tín hiệu lệnh bên ngoài |
| Chức năng khởi tạo tham số |
Đã cung cấp |
| Chức năng chọn tín hiệu đầu vào bên ngoài |
Qua CPU, qua bộ khuếch đại servo |
| Đánh dấu chức năng phát hiện |
|
Chế độ phát hiện liên tục, số chế độ phát hiện được chỉ định, chế độ đệm vòng |
| Đánh dấu tín hiệu phát hiện |
Tín hiệu cho số trục của bộ khuếch đại servo được kết nối |
| Đánh dấu cài đặt phát hiện |
16 cài đặt |
| Chức năng giám sát dữ liệu tùy chọn |
Lên đến 4 điểm / trục |
| Trả lại tự động |
Đã cung cấp |
| Chức năng máy hiện sóng kỹ thuật số |
Dữ liệu bit: 16 kênh, dữ liệu từ: 16 kênh * 4 |
- * 1. Số lượng đăng ký cam phụ thuộc vào dung lượng bộ nhớ, độ phân giải cam và số lượng tọa độ.
- * 2. Phương pháp trả về vị trí chính được đặt trong trình điều khiển (bộ khuếch đại servo) được sử dụng.
- * 3. Điều khiển nội suy tuyến tính 4 trục chỉ được bật ở tốc độ trục tham chiếu.
- *4. Tám kênh dữ liệu từng từ và dữ liệu bit có thể được hiển thị trong thời gian thực.
Cấu hình hệ thông
Mô-đun Chuyển động có thể hoạt động như một trạm chính của CC-Link IE TSN. * 1
Tính năng này cho phép người dùng tạo hệ thống linh hoạt hơn bằng cách kết nối các thiết bị khác nhau, chẳng hạn như bộ khuếch đại servo, mô-đun I / O từ xa và thiết bị TCP / IP với mô-đun Chuyển động.

- * 1. Mô-đun Chuyển động không được cung cấp các chức năng sau: trạm phụ, trạm cục bộ, cấu hình đa chủ và chức năng sao lưu / khôi phục.
- * 2. Các trạm tiêu chuẩn đề cập đến các trạm phụ khác với các trạm điều khiển chuyển động trên CC-Link IE TSN. Các thiết bị TCP / IP không được bao gồm trong các trạm tiêu chuẩn.