[Chương trình trình tự]
● Mô tả bậc thang phù hợp với quá trình quét
(Tầm quan trọng tập trung vào kiểm soát điều kiện)

● Điều khiển trình tự
(Tương thích với nhiều điểm I / O, nhiều thao tác)
● Hệ thống ngừng xử lý khi phát hiện lỗi
[Chương trình SFC chuyển động]
● Mô tả Motion SFC phù hợp với các quy trình sự kiện
(Tầm quan trọng tập trung vào kiểm soát tuần tự, theo đuổi khả năng đáp ứng sự kiện)
● Phản hồi tốc độ cao của Servo (Bắt đầu)
● Địa chỉ định vị, tốc độ hoạt động dữ liệu, thay đổi tốc độ
● Chức năng cao với đa nhiệm và phân nhánh
■ Giới thiệu các hướng dẫn PLC chuyên dụng cho Motion dễ sử dụng.
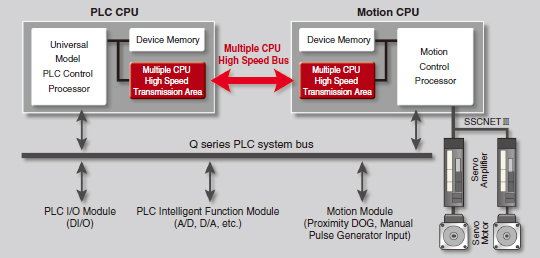
[Ngắt chương trình PLC để đồng bộ hóa nhiều CPU]
■ Sử dụng chức năng ngắt PLC mới được đồng bộ hóa với chu kỳ hoạt động chuyển động (0,88ms),
có thể đạt được thời gian thực xử lý chương trình bậc thang.
Ví dụ ứng dụng
1) Giá trị thời gian thực của động cơ có thể được so sánh với một điểm cụ thể và nếu điểm này bị chạy quá mức, PLC có thể bật tín hiệu đầu ra. (Sự thay đổi của quá trình xử lý so sánh không ảnh hưởng đến thời gian quét của bậc thang được xử lý trong vòng 0,88ms.)
2) Nhiều CPU Chuyển động có thể được khởi động đồng thời.
Kiểm soát phản hồi cao
Chu kỳ hoạt động Chuyển động 0,22 ms / 4 trục đạt được để đáp ứng nhu cầu của khách hàng trong thời gian thao tác ngắn hơn. Ngay cả ở chu kỳ hoạt động 0,44 ms, tối đa 10 trục được điều khiển mà không làm mất phản ứng cao.
[Hoàn hảo để kiểm soát đường cong mượt mà]
Dữ liệu lệnh từ Bộ điều khiển chuyển động được truyền đến bộ khuếch đại servo cứ sau 0,22 ms. Bộ điều khiển chuyển động với bộ khuếch đại Servo
(MR-J4-B) và động cơ servo (động cơ HG-KR: 4.194.304pulse / vòng) đạt được chu kỳ hoạt động ngắn hơn và chuyển động mượt mà.

Kiểm soát dòng chảy
Giảm hệ thống dây điện, tiết kiệm không gian
Số lượng dây và bộ phận giảm đáng kể khi Bộ điều khiển chuyển động được sử dụng với bộ khuếch đại servo 2 trục hoặc bộ khuếch đại servo 3 trục của sê-ri MR-J4. Khi Bộ điều khiển chuyển động được sử dụng với bộ khuếch đại servo MR-J4W3-B (loại 3 trục), không gian lắp đặt sẽ giảm đi khoảng 30%.
Mạng đồng bộ tốc độ cao SSCNETIII / H
(Lưu ý): SSCNET (Mạng điều khiển hệ thống Servo)
- Tốc độ truyền thông được tăng lên 150 Mbps song công (tương đương 300 Mbps bán song công), nhanh hơn ba lần so với tốc độ thông thường.
Phản ứng của hệ thống được cải thiện đáng kể.
- Có thể kiểm soát trơn tru máy bằng cách sử dụng truyền thông nối tiếp tốc độ cao với thời gian chu kỳ là 0,222 ms.
- Giao tiếp đồng bộ đạt được với SSCNETIII / H, mang lại lợi thế kỹ thuật cho các máy yêu cầu điều khiển xác định.
- Có thể đi dây khoảng cách xa lên đến 3200 m (10498,69 ft.) Cho mỗi hệ thống (tối đa 100 m (328,08 ft.) Giữa các trạm x trục điều khiển lên đến 32 trục), thích hợp cho các hệ thống quy mô lớn.
- Bộ khuếch đại servo tương thích SSCNETIII / H và SSCNETIII có thể được sử dụng cùng nhau.
(Tốc độ truyền thông khi các sản phẩm tương thích SSCNETIII được sử dụng cùng nhau trong cùng một hệ thống: 150 Mbps full duplex)
Điều khiển đồng bộ nâng cao
Điều khiển đồng bộ nâng cao có thể đạt được bằng cách sử dụng phần mềm thay vì điều khiển cơ học với bánh răng vật lý, trục, ly hợp, bánh răng thay đổi tốc độ hoặc cam, v.v. Ngoài ra, một cam dễ dàng được tạo ra với chức năng tự động tạo cam. Điều khiển đồng bộ có thể được khởi động / Kết thúc trên cơ sở từng trục. Các kích thước trong điều khiển đồng bộ và điều khiển định vị có thể được sử dụng cùng nhau trong một chương trình. Điều khiển tốc độ-mô-men xoắn có thể được thực hiện đồng thời với điều khiển đồng bộ.
[Kiểm soát dòng chảy]
[Tham số điều khiển đồng bộ]
● Điều khiển đồng bộ được thực hiện dễ dàng chỉ bằng cách cài đặt các thông số.
● Lượng chuyển động của trục chính có thể được truyền tới các trục đầu ra thông qua ly hợp.
● "Trục tạo lệnh" không được coi là trục điều khiển; do đó các trục đầu ra có thể được thiết lập bằng cách sử dụng tất cả các trục điều khiển có sẵn.
Chức năng quan sát an toàn
Hệ thống an toàn tuân thủ "EN ISO13849-1: 2008 Category 3 PLd" và "EN62061 SIL CL2" (các tiêu chuẩn này được hài hòa với các Chỉ thị Máy của Châu Âu). Chức năng an toàn (STO, SS1, SS2, SOS, SSM, SBC, SLS) theo tiêu chuẩn IEC61800-5-2 có sẵn dưới dạng tiêu chuẩn, cũng như chức năng so sánh tín hiệu an toàn, xác nhận trạng thái của tín hiệu đầu vào / đầu ra bằng cách CPU chuyển động và CPU PLC. Các điều kiện hoạt động cho các chức năng này được lập trình tự do bằng cách sử dụng các mạch bậc thang CPU PLC và CPU chuyển động.
Chức năng giám sát tốc độ
Tốc độ động cơ được giám sát để không vượt quá "Tốc độ an toàn" bởi CPU chuyển động và CPU PLC.
Chức năng so sánh tín hiệu an toàn
Các tín hiệu đầu vào an toàn được giám sát bằng cách sử dụng CPU Chuyển động, CPU PLC và mô-đun tín hiệu an toàn.
Môi trường kỹ thuật MELSOFT MT Works2
Môi trường lập trình mạnh mẽ và dễ sử dụng để điều khiển chuyển động nâng cao.
[Thiết kế hệ thống]
(Note-1) : Destination of the external input signals (FLS, RLS, DOG) can be changed with parameters.
(Note-2) : Be sure to use the cable for forced stop input (sold separately).
(Note-3) : Motion modules (Q172DLX/Q172DEX/Q173DPX) cannot be installed in CPU slot and I/O slot 0 to 2 of the main base unit.
(Note-4) : Install Q172DEX to the main base unit. Do not install to the extension base unit.
(Note-5) : It is impossible to mount the main base unit by DIN rail when using the Motion CPU module.
(Note-6) : Use the Graphic Operation Terminal (GOT) compatible with Motion CPU (Q173DSCPU/Q172DSCPU). When you use GOT2000, refer to the "GOT2000 Series Connection Manual (Mitsubishi Products)". When you use GOT1000, refer to the "GOT1000 Series Connection Manual (Mitsubishi Products)".