Ý tưởng

Để đáp ứng một loạt các ứng dụng bao gồm sản xuất bán dẫn và màn hình LCD, robot và máy chế biến thực phẩm, MELSERVO-J4 kết hợp với các dòng sản phẩm Mitsubishi Electric khác như bộ điều khiển chuyển động, mạng, thiết bị đầu cuối hoạt động đồ họa, bộ điều khiển có thể lập trình và hơn thế nữa. Điều này mang lại cho bạn sự tự do và linh hoạt để tạo ra một hệ thống servo tiên tiến hơn.
Hiệu suất cơ bản của Bộ khuếch đại Servo hàng đầu trong ngành
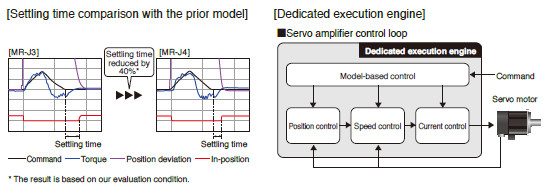
Đáp ứng tần số tốc độ 2,5 kHz đạt được bằng cách áp dụng kiến trúc điều khiển servo tốc độ cao ban đầu của chúng tôi được phát triển từ điều khiển thích ứng mô hình hai bậc tự do thông thường cho công cụ thực thi chuyên dụng. Cùng với bộ mã hóa vị trí tuyệt đối độ phân giải cao 4.194.304 xung / vòng, cho phép hoạt động nhanh chóng và chính xác. Hiệu suất của những cỗ máy cao cấp được tận dụng tối đa.
Cải thiện hiệu suất máy với Động cơ Servo hiệu suất cao
Với tốc độ xử lý được cải thiện, động cơ servo quay được trang bị bộ mã hóa độ phân giải cao cho phép định vị chính xác cao và quay trơn tru.

Chức năng điều chỉnh độ lợi Servo nâng cao
Điều chỉnh một chạm
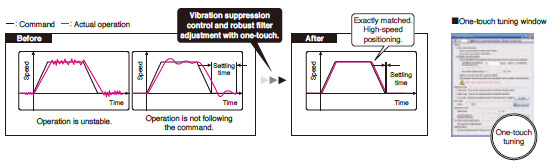
Chỉ cần bật chức năng điều chỉnh một chạm để hoàn thành điều chỉnh độ lợi servo tự động, bao gồm bộ lọc triệt tiêu cộng hưởng của máy, điều khiển triệt tiêu rung động II * 1 tiên tiến và bộ lọc mạnh mẽ để tối đa hóa hiệu suất máy của bạn. Chức năng này cũng đặt phản ứng tự động, trong khi tính năng tự động điều chỉnh thời gian thực yêu cầu cài đặt thủ công. Hơn nữa, một phương pháp mới * 2 cho phép tạo một lệnh điều chỉnh tối ưu bên trong bộ khuếch đại servo.
- * 1.Điều khiển triệt tiêu rung động tiên tiến II tự động điều chỉnh một tần số.
- * 2. Phương pháp mới này được hỗ trợ bởi MR-J4-B / MR-J4W_-B / MR-J4-A.
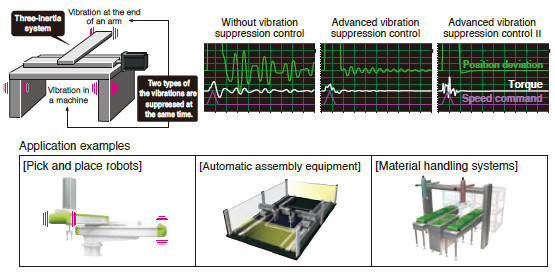
Kiểm soát chống rung nâng cao II
Điều khiển triệt tiêu rung động tiên tiến II ngăn chặn hai loại dao động tần số thấp, nhờ vào thuật toán triệt tiêu dao động hỗ trợ hệ thống ba quán tính. Chức năng này có hiệu quả trong việc triệt tiêu rung động dư có tần số tương đối thấp khoảng 100 Hz trở xuống được tạo ra ở cuối cánh tay và trong máy, cho phép thời gian lắng ngắn hơn.
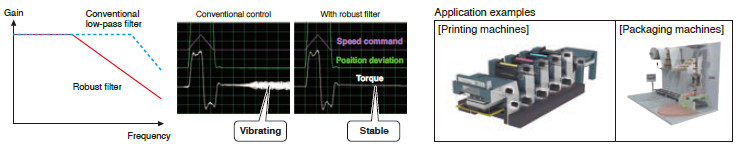
Bộ lọc mạnh mẽ
Khó đạt được cả độ nhạy và độ ổn định cao với điều khiển thông thường trong các hệ thống có quán tính cao với dây đai và bánh răng như máy in và máy đóng gói. Giờ đây, chức năng này cho phép đồng thời độ phản hồi cao và độ ổn định mà không cần điều chỉnh. Bộ lọc mạnh mẽ làm giảm dần sự dao động của mô-men xoắn trong dải tần số rộng và đạt được sự ổn định hơn so với mô hình trước đó.
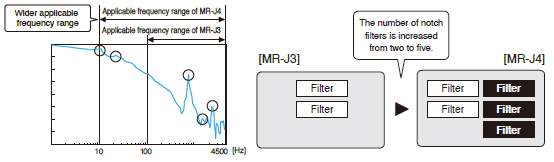
Bộ lọc triệt tiêu cộng hưởng máy mở rộng
Với cấu trúc bộ lọc tiên tiến, dải tần áp dụng được mở rộng từ 100 Hz đến 4500 Hz đến 10 Hz đến 4500 Hz. Ngoài ra, số lượng bộ lọc áp dụng đồng thời được tăng từ hai lên năm, cải thiện hiệu suất chống rung của máy.
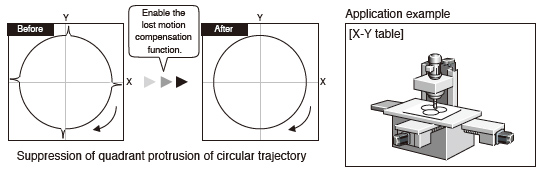
Chức năng bù chuyển động bị mất
Chức năng này ngăn chặn sự nhô ra của góc phần tư do ma sát và lực xoắn tạo ra khi động cơ servo quay theo hướng ngược lại. Do đó, độ chính xác của đường tròn sẽ được cải thiện trong điều khiển quỹ đạo được sử dụng trong bảng XY, v.v.
- * Chức năng này không được hỗ trợ bởi MR-J4W2-B và MR-J4W3-B.
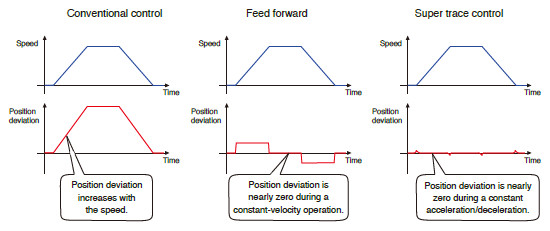
Kiểm soát siêu lần vết
Chức năng này làm giảm độ lệch vị trí xuống gần bằng không không chỉ trong quá trình vận hành ở tốc độ không đổi mà còn trong quá trình tăng / giảm tốc không đổi. Độ chính xác của quỹ đạo sẽ được cải thiện trong các máy có độ cứng cao.
- * Chức năng này không được hỗ trợ bởi MR-J4W2-B và MR-J4W3-B.
Một loạt các chức năng cho các ứng dụng khác nhau
* Sử dụng bộ điều khiển tương thích.
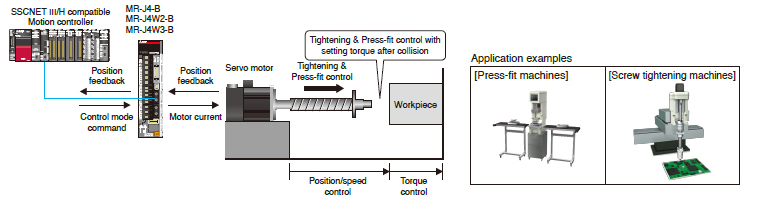
Điều khiển thắt chặt & nhấn vừa vặn

Chức năng này chuyển chế độ điều khiển vị trí / tốc độ sang chế độ điều khiển mô-men xoắn một cách trơn tru mà không cần dừng hoặc thay đổi đột ngột về tốc độ và mô-men xoắn, do đó giảm tải cho máy. Chức năng này phù hợp nhất cho các ứng dụng mà điều khiển được chuyển từ vị trí sang mô-men xoắn, chẳng hạn như điều khiển Siết & ép vừa vặn hoặc chèn một tác phẩm và siết chặt nắp hoặc vít.
- * Chức năng này được hỗ trợ bởi MR-J4-B / MR-J4W2-B / MR-J4W3-B.
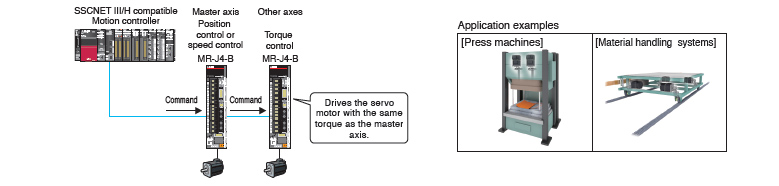
Chức năng hoạt động Master-Slave
Chức năng vận hành chủ-tớ cho phép truyền mô-men xoắn của trục chính đến các trục phụ thông qua SSCNET III / H và điều khiển các trục phụ với cùng mô-men xoắn với trục chính. Không cần đi dây đặc biệt.
Chức năng đo lường quy mô
Chức năng đo tỷ lệ của bộ khuếch đại servo MR-J4-GF / MR-J4-B / MR-J4W2-B * 1 * 2 cho phép truyền thông tin vị trí của bộ mã hóa đo tỷ lệ đến bộ điều khiển khi bộ mã hóa đo tỷ lệ được kết nối bán điều khiển vòng kín. Dữ liệu của bộ mã hóa tuyến tính hoặc đồng bộ được truyền đến bộ điều khiển hệ thống servo thông qua bộ khuếch đại servo, dẫn đến tốn ít dây hơn.
- * 1. Chức năng này không được hỗ trợ bởi MR-J4W2-0303B6.
- * 2. Sử dụng bộ khuếch đại servo tương ứng (MR-J4-GF / MR-J4-GF-RJ / MR-J4-B / MR-J4-B-RJ) cho bộ mã hóa phía tải.
Áp dụng cho các hệ thống điều khiển và lái xe khác nhau
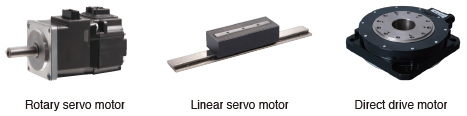
Động cơ Servo tương thích
Bộ khuếch đại servo dòng MR-J4 vận hành động cơ servo quay, động cơ servo tuyến tính và động cơ truyền động trực tiếp theo tiêu chuẩn * .
- * Tham khảo phần sau để biết các cách kết hợp có thể có giữa động cơ servo và bộ khuếch đại servo.
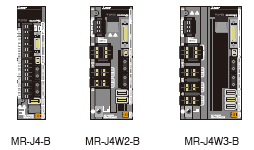
Bộ khuếch đại Servo 1 trục / 2 trục / 3 trục
Đối với bộ khuếch đại servo tương thích SSCNET III / H, loại 2 trục và 3 trục có sẵn ngoài loại 1 trục, cho phép các hệ thống linh hoạt dựa trên số lượng trục điều khiển.
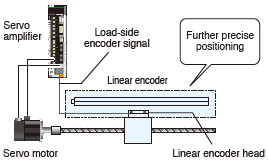
Hỗ trợ kiểm soát vòng lặp hoàn toàn khép kín
Hỗ trợ hệ thống điều khiển vòng kín hoàn toàn * 1 theo tiêu chuẩn, bộ khuếch đại servo MR-J4-GF / MR-J4-B / MR-J4-A cho phép định vị chính xác hơn nữa * 2 .
- * 1. Bộ khuếch đại servo MR-J4-GF / MR-J4-B / MR-J4-A tương thích với các bộ mã hóa tuyến tính nối tiếp loại hai dây. Đối với bộ mã hóa tuyến tính loại nối tiếp và giao diện tàu xung bốn dây (loại đầu ra vi phân pha A / B / Z), hãy sử dụng MR-J4-GF-RJ / MR-J4-B-RJ / MR-J4-A-RJ.
- * 2. Một số kiểu máy không hỗ trợ hệ thống điều khiển vòng kín hoàn toàn. Tham khảo "Các dòng sản phẩm" trong danh mục.
Nhiều nguồn cung cấp năng lượng và công suất
Mỗi bộ khuếch đại servo hỗ trợ các bộ nguồn mạch chính sau:
MR-J4-B / MR-J4-A: 3 pha 200 V AC / 400 V AC,
1 pha 100 V AC và 48 V DC / 24 V DC
Chúng cũng hỗ trợ nhiều loại công suất từ 30 W * đến 55 kW.
MR-J4-GF: 3 pha 200 V AC / 400 V AC, 1 pha 100 V AC
MR-J4-GF-RJ / MR-J4-B-RJ / MR-J4-A-RJ cũng hỗ trợ nguồn DC đầu vào.
- * Bộ khuếch đại servo 30 W hỗ trợ nguồn điện 48 V DC / 24 V DC.
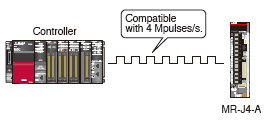
Tần số xung lệnh tối đa
Bộ khuếch đại servo MR-J4-A tương thích với giao diện mục đích chung hỗ trợ tần số xung lệnh tối đa là 4 Mpulse / s (khi sử dụng bộ thu vi sai).
Khi bộ thu mở được sử dụng, cả đầu vào chìm và đầu vào nguồn đều được bật.
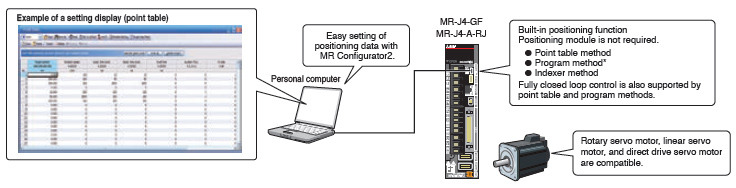
Chức năng định vị tích hợp cho hệ thống đơn giản
MR-J4-GF (-RJ) và MR-J4-A-RJ với chức năng định vị tích hợp
MR-J4-GF (-RJ) và MR-J4-A-RJ có chức năng định vị tích hợp, cho phép hoạt động định vị với các phương pháp bảng điểm, dựa trên chương trình * và chỉ mục. Với các bộ khuếch đại servo này, một hệ thống định vị được cấu hình mà không cần mô-đun Định vị (xung lệnh). Lệnh định vị được thực thi bởi mạng CC-Link IE Field, các tín hiệu đầu vào / đầu ra hoặc giao tiếp RS-422 / RS-485 (lên đến 32 trục). MR Configurator2 cho phép dễ dàng cài đặt dữ liệu định vị.
- * Phương pháp dựa trên chương trình chỉ được hỗ trợ bởi MR-J4-A-RJ.
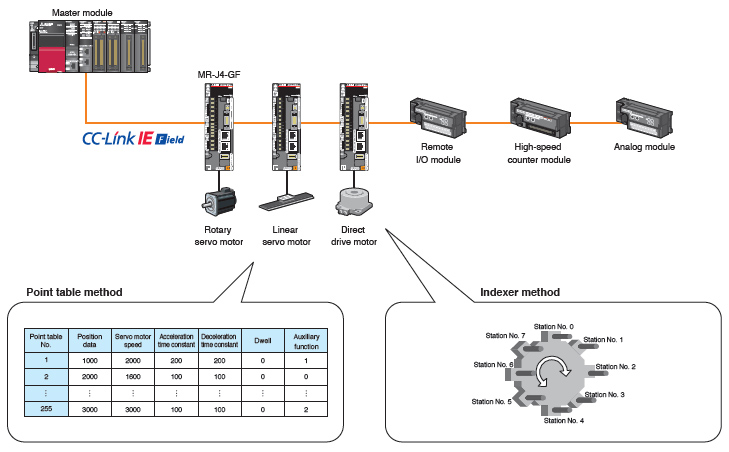
Phương pháp bảng điểm

Đặt dữ liệu vị trí (vị trí mục tiêu), tốc độ động cơ servo và hằng số thời gian tăng / giảm tốc trong bảng điểm. Cài đặt dữ liệu bảng điểm (có thể thiết lập lên đến 255 điểm) dễ dàng như cài đặt các thông số. Thực hiện thao tác định vị bằng tín hiệu khởi động sau khi chọn bảng điểm Nos.

- * Đối với MR-J4-A-RJ, bảng điểm có thể được thiết lập bằng các nút nhấn trên bộ khuếch đại servo hoặc với đơn vị tham số MR-PRU03.
Phương pháp chương trình *

Tạo chương trình định vị bằng các lệnh chuyên dụng và thực hiện thao tác định vị bằng tín hiệu khởi động sau khi chọn số chương trình. Phương pháp dựa trên chương trình cho phép thao tác định vị phức tạp hơn phương pháp bảng điểm. Có thể cài đặt tối đa 256 chương trình. (Tổng số bước của tất cả các chương trình: 640)
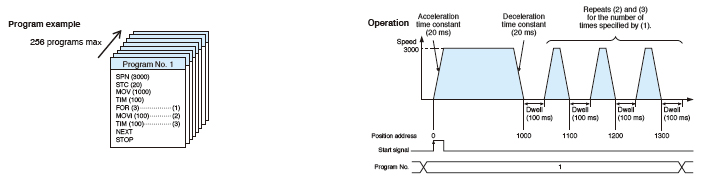
- * MR Configurator2 được yêu cầu để tạo chương trình.
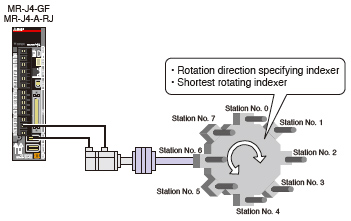
Phương thức lập chỉ mục *
Thực hiện thao tác định vị bằng cách chỉ định các trạm được chia đều (tối đa 255 trạm) và số răng của bánh răng trên các mặt của máy và động cơ. Khoảng cách di chuyển sẽ được tính toán tự động dựa trên số lượng trạm chia đều được thiết lập trong tham số. Thao tác định vị được thực hiện với tín hiệu bắt đầu sau khi chọn Số vị trí trạm.
Có thể đặt hướng xoay chỉ định chỉ mục hoặc chỉ mục xoay ngắn nhất.
- * Chế độ điều khiển vòng kín hoàn toàn và chế độ điều khiển động cơ servo tuyến tính không được phương pháp chỉ mục hỗ trợ.
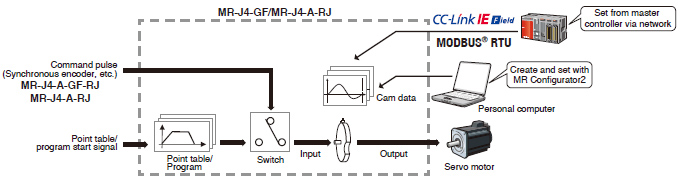
Các chức năng hữu ích mới với chức năng định vị
* Không được hỗ trợ bởi MR-J4-03A6-RJ.
Các chức năng hữu ích mới được thêm vào chức năng định vị: chức năng cam đơn giản, chức năng theo dõi bộ mã hóa, đầu vào xung thông qua chức năng, chức năng bù vị trí cam đơn giản và chức năng giao tiếp (MODBUS ® RTU, định vị điểm tới điểm và chức năng chốt vị trí hiện tại). Áp dụng các chức năng hữu ích này cho nhiều ứng dụng khác nhau để cấu hình hệ thống định vị một cách dễ dàng.
Chức năng cam đơn giản
Các mẫu dữ liệu cam khác nhau được tạo dễ dàng với MR Configurator2. Xung lệnh hoặc bảng điểm / tín hiệu bắt đầu chương trình được sử dụng làm đầu vào cho cam đơn giản. Lệnh đầu vào sẽ được xuất ra động cơ servo theo dữ liệu cam.
- * Phương pháp dựa trên chương trình chỉ được hỗ trợ bởi MR-J4-A-RJ.
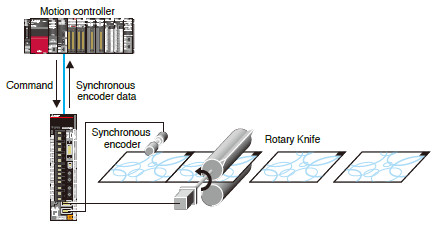
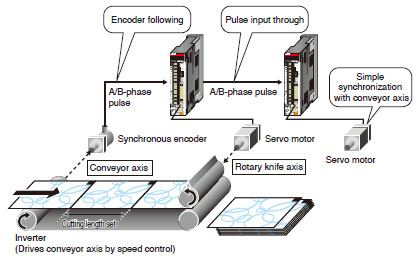
Bộ mã hóa sau chức năng / Đầu vào xung thông qua chức năng *

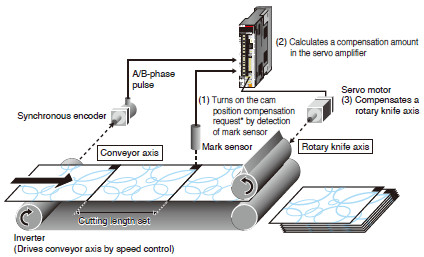
Với chức năng sau bộ mã hóa, bộ khuếch đại servo nhận tín hiệu đầu ra pha A / B từ bộ mã hóa đồng bộ dưới dạng xung lệnh và lệnh đầu vào sẽ được xuất ra động cơ servo theo dữ liệu cam. Đặt dữ liệu cam khớp với chiều dài tấm, chu vi của trục dao quay và phần đồng bộ của tấm cho phép một hệ thống trong đó trục băng tải và trục dao quay được đồng bộ hóa. Đầu vào lên đến 4 Mpulse / s từ bộ mã hóa đồng bộ tương thích với bộ khuếch đại servo. Đầu vào xung thông qua chức năng cho phép trục đầu tiên xuất ra các xung pha A / B được nhận từ bộ mã hóa đồng bộ đến trục tiếp theo, cho phép một hệ thống trong đó các trục tiếp theo được đồng bộ hóa với bộ mã hóa đồng bộ.
- * Đầu vào xung thông qua chức năng có sẵn dưới dạng đầu vào xung pha A / B thông qua chức năng cho MR-J4-GF-RJ và đầu vào xung lệnh thông qua chức năng cho MR-J4-A-RJ.
Chức năng bù vị trí cam đơn giản *
Vị trí thực tế của động cơ servo thu được dựa trên các đầu vào từ cảm biến phát hiện các dấu đăng ký được in trên phim chuyển động tốc độ cao. Bộ khuếch đại servo tính toán lượng bù và sửa lỗi vị trí của trục dao quay dựa trên các đầu vào đó từ cảm biến để có thể cắt phim ở vị trí đã đặt.
- * "Yêu cầu bù vị trí cam" được bật với đầu vào đầu dò cảm ứng cho MR-J4-GF-RJ và đầu vào cảm biến đánh dấu cho MR-J4-A-RJ.
Chức năng giao tiếp (MODBUS ® RTU)
Ngoài giao tiếp RS-422 / RS-485 (giao thức servo AC cho mục đích chung của Mitsubishi Electric), giao tiếp RS-485 ( giao thức MODBUS ® RTU) được hỗ trợ. Giao thức MODBUS ® RTU tương thích với mã chức năng 03h (Thanh ghi giữ đọc), v.v ... Có thể
điều khiển và giám sát bộ khuếch đại servo bằng các thiết bị bên ngoài.
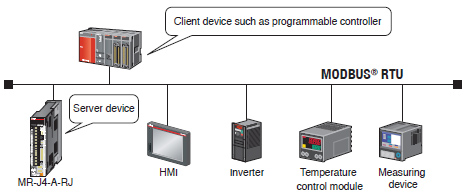
- * Cần có khối đầu cuối đầu nối mối nối RJ-45 và cáp tương thích RJ-45 được thiết kế cho MR-J4-A-RJ.
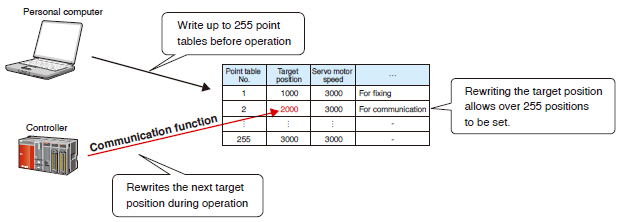
Chức năng giao tiếp (Định vị điểm đến điểm)
Lên đến 255 điểm định vị Điểm đến Điểm được bật khi vị trí mục tiêu được đặt trước trong bảng điểm. Chức năng giao tiếp cũng có thể viết lại vị trí mục tiêu tiếp theo trong quá trình hoạt động.
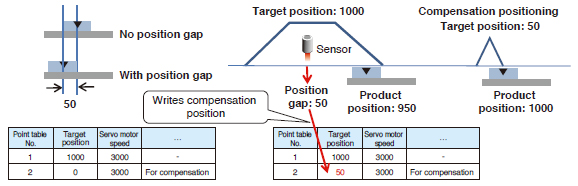
Chức năng giao tiếp (chốt vị trí hiện tại)
Dựa trên dữ liệu được chốt bởi chức năng phát hiện đánh dấu (chốt vị trí hiện tại *), vị trí mục tiêu được bù bằng cách ghi vào bảng điểm.
- * Khi tín hiệu phát hiện đánh dấu bật, vị trí hiện tại sẽ được chốt và dữ liệu đã chốt sẽ được đọc bằng chức năng giao tiếp.
- Ví dụ: Thực hiện bù định vị khi một sản phẩm bị đặt sai vị trí 50 trên một pallet xếp dỡ.
Bắt đầu một hoạt động bằng cách chỉ định bảng điểm số 1 (vị trí mục tiêu: 1000).
Chức năng giao tiếp (chốt vị trí hiện tại) đo khoảng cách vị trí với chức năng phát hiện dấu hiệu và ghi khoảng cách vị trí là 50 vào vị trí mục tiêu trong bảng điểm số 2 để bù trong quá trình hoạt động.
Sau khi hoàn thành hoạt động của bảng điểm số 1 với khoảng cách vị trí là 50, hãy bắt đầu hoạt động bằng cách chỉ định bảng điểm số 2. Sản phẩm sẽ được đặt đúng vị trí.
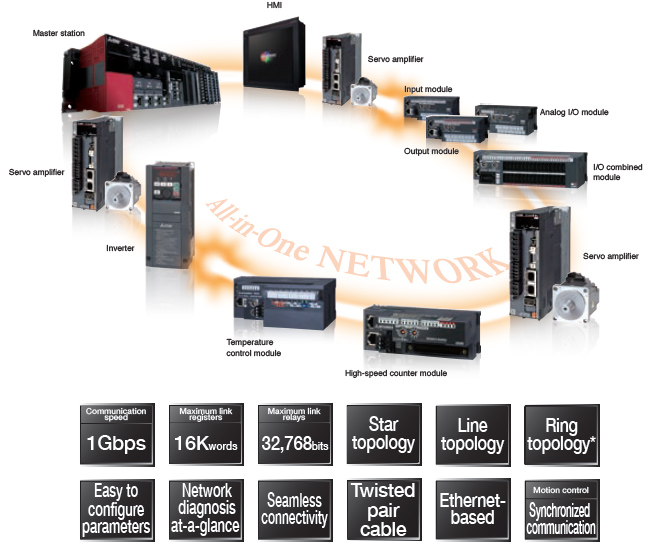
Mạng toàn diện với Trường CC-Link IE
Mạng tất cả trong một
Mạng được thiết kế để xử lý đồng thời điều khiển phân tán, điều khiển I / O và điều khiển chuyển động. CC-Link IE Field Network cho phép bạn kết nối các thiết bị hiện trường như bộ điều khiển có thể lập trình, mô-đun I / O, mô-đun bộ đếm tốc độ cao, bộ khuếch đại servo, bộ biến tần và màn hình, cung cấp mạng tối ưu phù hợp nhất với nhu cầu của ứng dụng.
Chọn từ cấu trúc liên kết hình sao, đường hoặc vòng * phù hợp với bố cục của đường dây và máy móc.
- * Mô-đun Chuyển động Đơn giản không hỗ trợ cấu trúc liên kết vòng.
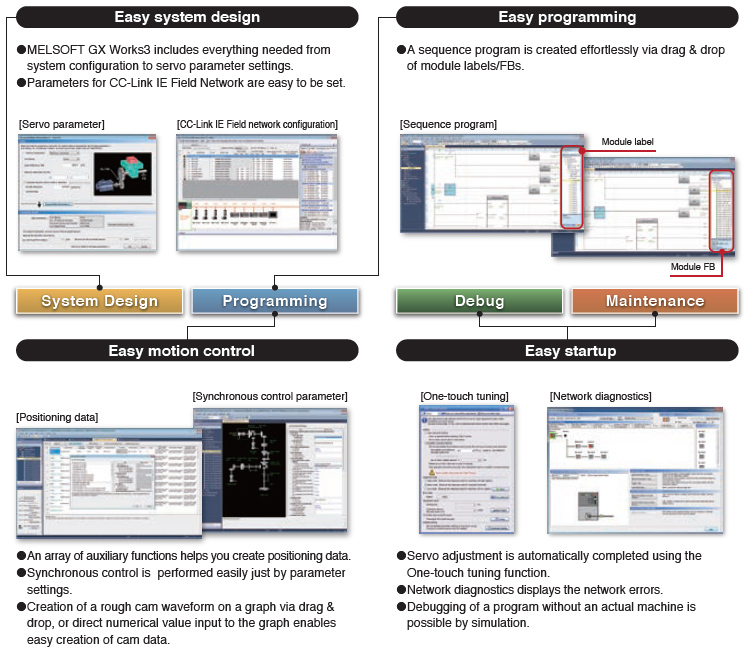
Phần mềm kỹ thuật tất cả trong một
MELSOFT GX Works3 tất cả trong một này bao gồm tất cả các khía cạnh của chu trình phát triển sản phẩm từ thiết kế hệ thống đến bảo trì - bao gồm lập trình, cài đặt Mạng trường CC-Link IE và các mô-đun Chuyển động đơn giản và điều chỉnh bộ khuếch đại servo.
Hệ thống lái xe toàn diện với CC-Link IE Field
Tương thích với Mạng trường CC-Link IE
MR-J4-GF (-RJ) tương thích với Mạng trường CC-Link IE theo tiêu chuẩn.
Bộ khuếch đại servo có thể kết nối với Mạng CC-Link IE Field Network dựa trên Ethernet, cho phép giao tiếp tốc độ cao, liền mạch.
Định vị dễ dàng với Mạng trường CC-Link IE
Sự kết hợp giữa mô-đun chính và MR-J4-GF (-RJ) cho phép hoạt động định vị với phương pháp bảng điểm hoặc phương pháp chỉ mục, không yêu cầu mô-đun Định vị. Với phương pháp bảng điểm, chỉ cần đặt số bảng điểm và bật tín hiệu khởi động, sau đó hoạt động định vị sẽ được bắt đầu. Hoạt động liên tục của bảng điểm tiếp theo cũng có thể được thực hiện mà không dừng lại.
Trong phương pháp lập chỉ mục, lượng hành trình được tính toán tự động dựa trên số lượng trạm được thiết lập trong tham số.
Để biết thêm chi tiết về chức năng định vị, hãy tham khảo " Chức năng định vị ".
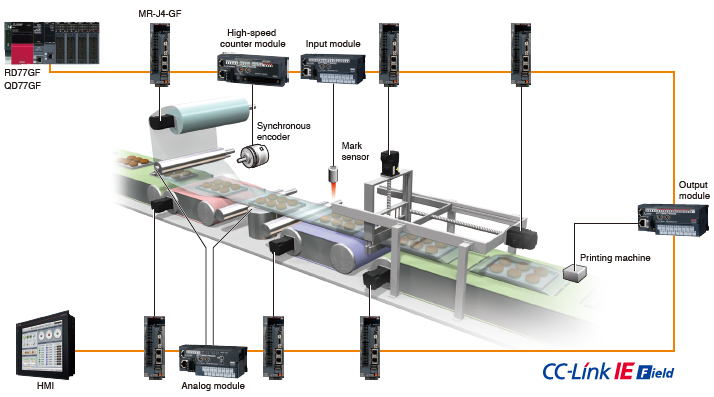
CC-Link IE Field Network Motion Control Control
Sự kết hợp giữa mô-đun Chuyển động Đơn giản và MR-J4-GF (-RJ) cho phép điều khiển đồng bộ và điều khiển nội suy hiệu suất cao với cài đặt tham số đơn giản và bắt đầu từ chương trình tuần tự. Cũng có thể kiểm soát tốc độ và kiểm soát mô-men xoắn, thích hợp cho việc chuyển đổi máy móc. Ngoài ra, việc sử dụng các đầu vào / đầu ra từ xa tương thích với chức năng giao tiếp đồng bộ cho phép hệ thống được đồng bộ hóa với chu kỳ lệnh của bộ khuếch đại servo.
Ví dụ về các đầu vào / đầu ra được đồng bộ hóa với chu kỳ lệnh của bộ khuếch đại servo
Một bộ mã hóa đồng bộ, máy rút, máy in có thể được đồng bộ hóa với chu trình giao tiếp lệnh servo.
Hỗ trợ CC-Link IE Field Network Basic * 3
Với xu hướng gần đây của IoT * 1 , kết nối mạng của các thiết bị và thiết bị cho các hệ thống quy mô nhỏ đang trở nên phổ biến hơn. CC-Link IE Field Network Basic nhận ra việc tích hợp mạng dễ dàng hơn các thiết bị Ethernet, vì ngăn xếp truyền thông tuần hoàn của nó dựa trên phần mềm, mà không yêu cầu ASIC chuyên dụng, giúp giảm chi phí triển khai cho các đối tác thiết bị.
Thông tin liên lạc minh bạch đạt được bằng cách sử dụng SLMP * 2 cho phép kết nối liền mạch trong tất cả các cấp độ sản xuất.
- * 1. Internet of Things
- * 2. Giao thức tin nhắn liền mạch
- * 3. Mạng CC-Link IE Field Network được MR-J4-GF hỗ trợ với phiên bản phần mềm A4 trở lên.
Tham khảo Hướng dẫn sử dụng CC-Link IE Field Network Basic.
Hệ thống Servo đáp ứng cao đã đạt được với SSCNET III / H
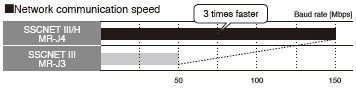
Tốc độ truyền thông nhanh hơn gấp ba lần
Tốc độ truyền thông được tăng lên 150 Mbps song công (tương đương 300 Mbps bán song công), nhanh hơn ba lần so với tốc độ thông thường. Phản ứng của hệ thống được cải thiện đáng kể.
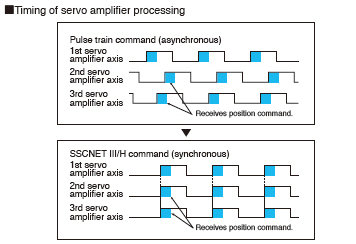
Giao tiếp đồng bộ
Giao tiếp đồng bộ đạt được với SSCNET III / H, mang lại lợi thế kỹ thuật cho các máy móc trong ngành in và chế biến thực phẩm yêu cầu điều khiển xác định.
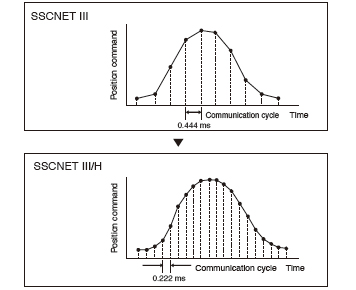
Thời gian chu kỳ nhanh tới 0,222 ms
Có thể kiểm soát trơn tru máy bằng cách sử dụng giao tiếp nối tiếp tốc độ cao với thời gian chu kỳ là 0,222 ms.
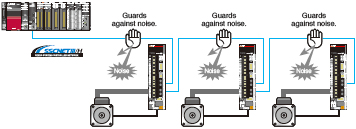
Cải thiện khả năng chịu tiếng ồn bằng giao tiếp quang học
Cáp quang loại bỏ triệt để tiếng ồn xâm nhập từ cáp nguồn hoặc các thiết bị bên ngoài. Khả năng chịu tiếng ồn được cải thiện đáng kể so với cáp kim loại.
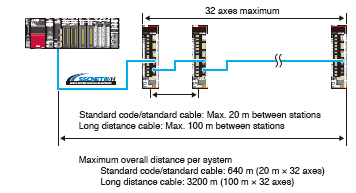
Khoảng cách dây dài lên đến 3200 m
Có thể đi dây khoảng cách xa lên đến 3200 m cho mỗi hệ thống (tối đa 100 m giữa các trạm × 32 trục), thích hợp cho các hệ thống quy mô lớn.
- * Đây là khi tất cả các trục được kết nối qua SSCNET III / H.
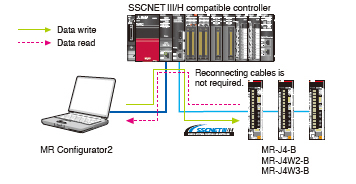
Kiểm soát trung tâm với mạng
Một lượng lớn dữ liệu servo được trao đổi trong thời gian thực giữa bộ điều khiển và bộ khuếch đại servo.
Sử dụng MELSOFT MR Configurator2 trên máy tính cá nhân được kết nối với Bộ điều khiển chuyển động hoặc mô-đun Chuyển động đơn giản giúp hợp nhất thông tin như cài đặt thông số và giám sát cho nhiều bộ khuếch đại servo.
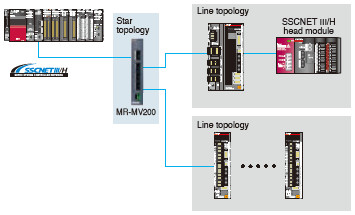
Cấu trúc mạng
Cấu trúc liên kết hình sao và đường dây có sẵn với thiết bị trung tâm quang MR-MV200 * thông qua SSCNET III / H cho cấu hình mạng. Có thể thực hiện bảo trì mà không cần dừng toàn bộ hệ thống, do đó tốc độ hoạt động sẽ được tăng lên.
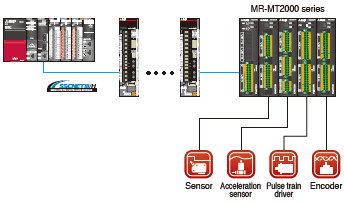
Tín hiệu I / O được đồng bộ hóa với Điều khiển chuyển động
Các mô-đun cảm biến dòng MR-MT2000 bao gồm mô-đun I / O, mô-đun I / O tương tự, mô-đun I / O xung và mô-đun I / F bộ mã hóa được kết nối với SSCNET III / H.
Các mô-đun khác nhau này cho phép vận hành máy nhanh hơn, chính xác hơn bằng cách đồng bộ hóa I / Os của trình điều khiển tàu xung đa năng, cảm biến và bộ mã hóa SSI với điều khiển chuyển động.
* Đối với thiết bị trung tâm quang MR-MV200 và mô-đun cảm biến MR-MT2000, hãy tham khảo
Các tính năng nâng cao cho sự an toàn đẳng cấp thế giới
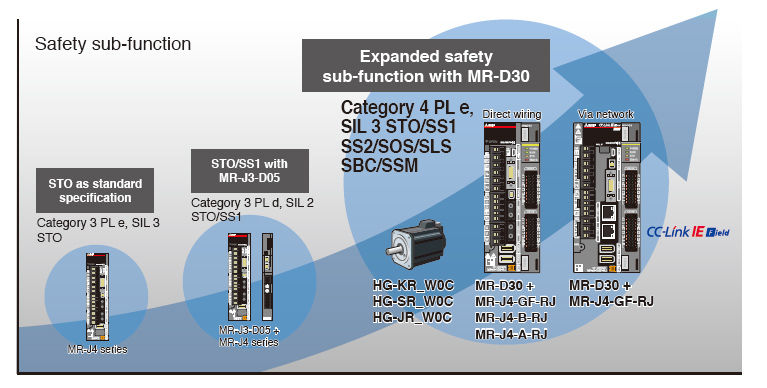
Được trang bị chức năng phụ an toàn
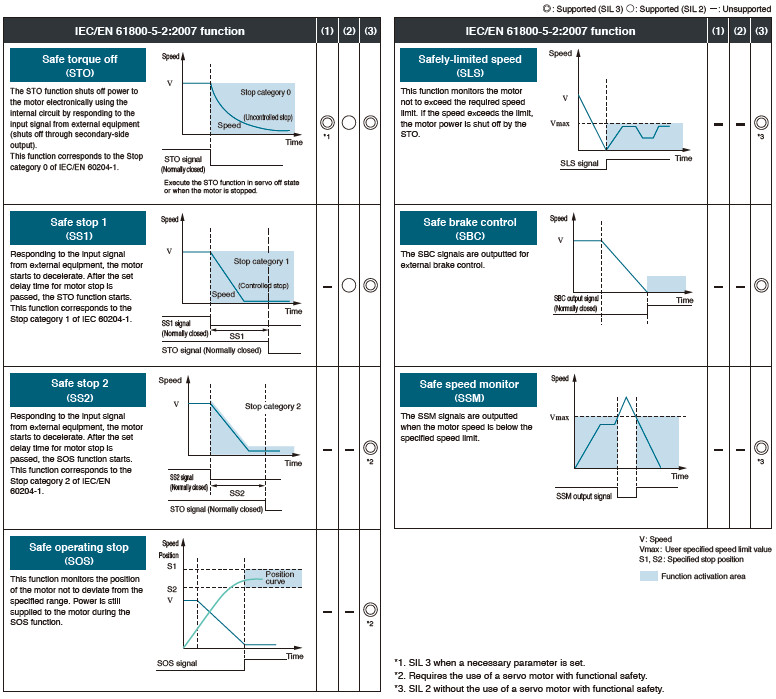
Các chức năng Tuân theo IEC / EN 61800-5-2
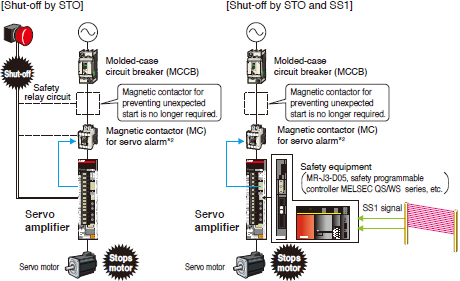
STO (Tắt mô-men xoắn an toàn) và SS1 * 1 (Dừng an toàn 1) được tích hợp theo tiêu chuẩn, cho phép cấu hình hệ thống an toàn dễ dàng trong máy.
- · Bằng cách sử dụng STO, không cần thiết phải tắt nguồn điều khiển của bộ khuếch đại servo, dẫn đến thời gian khởi động lại ngắn hơn và loại bỏ sự cần thiết của việc quay lại vị trí tại nhà.
- · Không cần một công tắc tơ từ tính để ngăn động cơ khởi động bất ngờ. * 2
- · Mức độ an toàn của STO được tăng lên SIL 3 từ SIL 2. * 3, 4
* 1. Cần có thiết bị an toàn (MR-J3-D05, bộ điều khiển lập trình an toàn MELSEC QS / WS series, v.v.).
* 2. Đối với bộ khuếch đại servo dòng MR-J4, công tắc tơ từ tính không cần thiết để đáp ứng các yêu cầu STO. Tuy nhiên, hình minh họa này có một công tắc tơ từ được lắp đặt để ngăn chặn cảnh báo servo và điện giật.
* 3. Bộ khuếch đại servo được sản xuất tại Nhật Bản vào tháng 6 năm 2015 trở lên hoặc tại Trung Quốc vào tháng 12 năm 2015 trở lên là bắt buộc và cần phải đặt thông số.
*4. Đối với Loại 3 PL e, SIL 3, hãy sử dụng thiết bị an toàn tương thích và đặt các thông số. Khi MR-J3-D05 được sử dụng, mức độ an toàn là Loại 3 PL d, SIL 2.
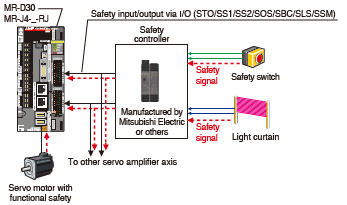
Tăng mức độ an toàn với Bộ an toàn chức năng MR-D30
Đạt được Loại 4 PL e, SIL 3
● Bằng cách nối dây tới bộ phận an toàn chức năng MR-D30
Mức độ an toàn là Loại 4 PL e, SIL 3 khi các tín hiệu an toàn được đưa trực tiếp vào bộ an toàn chức năng MR-D30. Chức năng phụ an toàn được vận hành trên MR-D30 bằng cách cài đặt thông số, và do đó có thể mở rộng chức năng phụ an toàn độc lập với bộ điều khiển.
* 1. Yêu cầu sử dụng động cơ servo có chức năng an toàn.
* 2. Mức độ an toàn là Loại 3 PL d, SIL 2 khi động cơ servo có chức năng an toàn không được sử dụng.
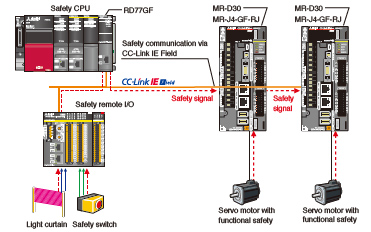
● Bằng Mạng trường CC-Link IE
Khi MR-J4-GF-RJ được kết hợp với CPU an toàn R_SFCPU-SET và mô-đun Chuyển động đơn giản RD77GF, MR-J4-GF-RJ nhận được dữ liệu tín hiệu an toàn thông qua Mạng trường CC-Link IE được kết nối với RD77GF và do đó nối dây an toàn tín hiệu đến I / O của MR-D30 là không cần thiết.
* 1. Yêu cầu sử dụng động cơ servo có chức năng an toàn.
* 2. Mức độ an toàn là Loại 3 PL d, SIL 2 khi động cơ servo có chức năng an toàn không được sử dụng.
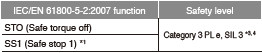
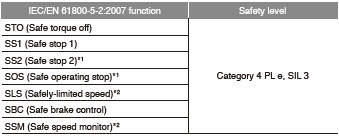
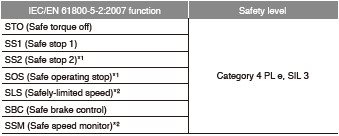
Đạt được các chức năng IEC / EN 61800-5-2
(1) Các chức năng có thể đạt được với MR-J4-GF (-RJ) / MR-J4-B (-RJ) / MR-J4W_-B / MR-J4-A (-RJ)
(2) Các chức năng có thể đạt được với MR-J3 -D05 và MR-J4-GF (-RJ) / MR-J4-B (-RJ) / MR-J4W_-B / MR-J4-A (-RJ)
(3) Có thể đạt được các chức năng với MR-D30 + MR- J4-GF-RJ / MR-J4-B-RJ / MR-J4-A-RJ
Chức năng bảo trì để đạt được mức giảm TCO ** TCO: Tổng chi phí sở hữu
Tuân thủ SEMI-F47
Bộ khuếch đại servo dòng MELSERVO-J4 tuân thủ tiêu chuẩn SEMI-F47 * tương ứng với chất bán dẫn và hệ thống sản xuất FPD. (SEMI-F47 không áp dụng cho đầu vào 1 pha 100 V AC, 1 pha 200 V AC và đầu vào DC. Để tuân thủ SEMI-F47 với bộ khuếch đại servo 9 kW trở lên, phanh động không thể sử dụng được.)
* Nguồn điện điều khiển của bộ khuếch đại servo tuân theo SEMI-F47. Lưu ý rằng tụ điện dự phòng có thể được yêu cầu tùy thuộc vào trở kháng nguồn và tình huống hoạt động đối với sự cố mất điện tức thời của nguồn điện mạch chính. Đảm bảo thực hiện kiểm tra trên máy của bạn để đáp ứng Tiêu chuẩn Miễn nhiễm Điện áp SEMI-F47. Vui lòng sử dụng nguồn điện 3 pha cho đầu vào bộ khuếch đại servo.
Chức năng ổ cứng
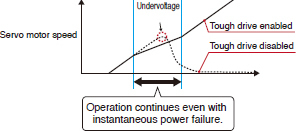
Mất điện tức thời ổ cứng
Khi phát hiện mất điện tức thời, chức năng này cho phép bộ khuếch đại servo sử dụng năng lượng điện được sạc trong tụ điện mạch chính trong bộ khuếch đại servo để tránh xảy ra cảnh báo, tăng khả năng sẵn sàng của máy ngay cả khi có nguồn điện không ổn định.
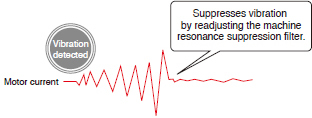
Rung động mạnh mẽ
Bộ lọc triệt tiêu cộng hưởng của máy được tự động điều chỉnh lại khi bộ khuếch đại servo phát hiện sự thay đổi trong tần số cộng hưởng của máy, giảm thời gian chết máy ngoài kế hoạch gây ra bởi sự xuống cấp do tuổi tác.
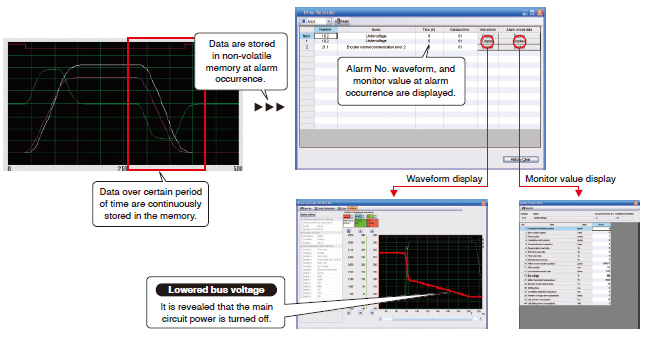
Máy ghi ổ đĩa dung lượng lớn
● Dữ liệu servo như dòng động cơ và lệnh vị trí trước và sau khi xảy ra cảnh báo được lưu trữ trong bộ nhớ không thay đổi của bộ khuếch đại servo. Đọc dữ liệu servo trên MR Configurator2 giúp bạn phân tích nguyên nhân của cảnh báo.
● Kiểm tra dạng sóng ((tương tự 16 bit × 7 kênh + 8 kênh kỹ thuật số) × 256 điểm) và giá trị màn hình của các lần báo động 16 lần trước trong lịch sử cảnh báo.
Chức năng chẩn đoán máy
Chức năng này phát hiện những thay đổi trong các bộ phận cơ khí (trục vít bi, thanh dẫn, ổ trục, dây đai, v.v.) bằng cách phân tích những thay đổi về ma sát của máy, mômen quán tính tải, mômen không cân bằng và các thành phần rung động từ dữ liệu bên trong bộ khuếch đại servo, hỗ trợ bảo trì kịp thời Các bộ phận.

Báo thức ba chữ số
[Ví dụ về cửa sổ cảnh báo trên MR Configurator2]
![[Ví dụ về cửa sổ cảnh báo trên MR Configurator2]](https://www.mitsubishielectric.com/fa/products/drv/servo/pmerit/mr_j4/amp/images/man_i08-2.jpg)
Dòng MR-J4 hiển thị số cảnh báo bằng ba chữ số để hiển thị cảnh báo servo chi tiết hơn, giúp khắc phục sự cố dễ dàng.
[Màn hình báo thức ba chữ số]
![[Màn hình báo thức ba chữ số]](https://www.mitsubishielectric.com/fa/products/drv/servo/pmerit/mr_j4/amp/images/man_i08-1.jpg)
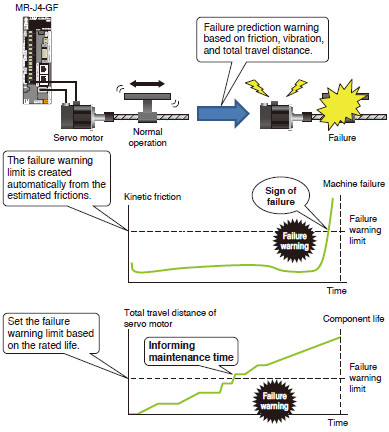
Bảo trì dự đoán
MR-J4-GF phát hiện những thay đổi liên quan đến lão hóa trong hiệu suất của máy dựa trên ma sát và rung động được theo dõi bởi chức năng chẩn đoán máy và thông báo thời gian bảo trì bằng một cảnh báo. MR-J4-GF cũng lưu trữ tổng quãng đường di chuyển của động cơ servo và thông báo thời gian bảo trì với cảnh báo khi tổng quãng đường di chuyển vượt quá giới hạn cảnh báo do bạn thiết lập. Khi giới hạn được đặt thành tuổi thọ danh định của vít me bi hoặc ổ trục, việc bảo dưỡng phòng ngừa có thể được thực hiện tùy theo hoạt động thực tế của máy.
Bộ khuếch đại Servo nhiều trục hài hòa với xã hội thân thiện với môi trường
Loại 2 trục / 3 trục cho máy tiết kiệm năng lượng, thu nhỏ và chi phí thấp
Bộ khuếch đại servo 2 trục và 3 trục có sẵn để vận hành hai và ba động cơ servo tương ứng. Các bộ khuếch đại servo này cho phép máy nhỏ gọn, tiết kiệm năng lượng với chi phí thấp hơn. Các loại động cơ servo khác nhau bao gồm động cơ servo quay, động cơ servo tuyến tính và động cơ dẫn động trực tiếp được kết hợp tự do miễn là động cơ servo tương thích với bộ khuếch đại servo *.

Tiết kiệm không gian với loại 3 trục * nhỏ nhất trong ngành
Bộ khuếch đại servo 2 trục MR-J4W2-B yêu cầu không gian lắp đặt ít hơn 26% so với hai bộ MR-J4-B. Bộ khuếch đại servo 3 trục MR-J4W3-B yêu cầu không gian lắp đặt ít hơn 30% so với ba bộ MR-J4-B.

* Dựa trên nghiên cứu của Mitsubishi Electric tính đến tháng 2 năm 2019
Giảm số dây điện khoảng. 50% với loại 3 trục
Ba trục của bộ khuếch đại servo 3 trục MR-J4W3-B sử dụng cùng một kết nối cho nguồn mạch chính và mạch điều khiển, thiết bị ngoại vi, dây tín hiệu điều khiển, v.v. Do đó, số lượng dây và thiết bị được giảm đáng kể.

Hệ thống tiết kiệm năng lượng tối ưu cho hệ thống của bạn

Tiết kiệm năng lượng với Kết nối Bus DC chung
Khi nhiều bộ khuếch đại servo và bộ truyền động được kết nối với bộ chuyển đổi tái tạo năng lượng MR-CV bằng kết nối bus DC chung, công suất tái tạo của một trục được sử dụng để dẫn động các trục khác, góp phần tiết kiệm năng lượng.
Bộ khuếch đại servo nhiều trục cũng có tác dụng tương tự.

Tiết kiệm năng lượng hơn nữa với Hệ thống tái tạo năng lượng
Bộ chuyển đổi tái tạo năng lượng MR-CV có một hệ thống tái tạo năng lượng để trả năng lượng tái tạo trở lại nguồn điện, cho phép sử dụng năng lượng tái tạo cho các hệ thống khác để tiết kiệm năng lượng hơn nữa.
Ngoài ra, khi sử dụng bộ chuyển đổi tái tạo năng lượng MR-CV, không cần tùy chọn tái tạo và do đó, tổng lượng nhiệt phát ra trong hệ thống sẽ giảm xuống.

Chức năng và Hiệu suất nâng cao để tiết kiệm năng lượng hơn
Giảm tổn thất năng lượng của bộ khuếch đại servo và động cơ servo
[Bộ khuếch đại Servo] Hiệu quả được tăng lên khi sử dụng mô-đun nguồn mới.
[Động cơ servo] Hiệu suất động cơ được tăng lên nhờ thiết kế mạch từ được tối ưu hóa.

Tiết kiệm năng lượng do hiệu suất máy được cải thiện
Bộ khuếch đại servo và động cơ servo với cấp hiệu suất cao hàng đầu trong ngành giúp giảm thời gian chu kỳ máy và thời gian hoạt động, dẫn đến tiêu thụ ít năng lượng hơn.

Chức năng giám sát nguồn điện
Công suất truyền động / tái tạo được tính toán từ dữ liệu như tốc độ và dòng điện trong bộ khuếch đại servo và MR Configurator2 giám sát dữ liệu hoạt động bao gồm cả mức tiêu thụ điện năng. Trong hệ thống Mạng trường CC-Link IE hoặc SSCNET III / H, dữ liệu được truyền tới bộ điều khiển và mức tiêu thụ điện năng được phân tích và hiển thị.

Tiết kiệm năng lượng đạt được bởi Dòng động cơ Servo tuyến tính LM-H3
Giảm công suất động cơ
LM-H3 đã đạt được mức giảm 25% * trong dòng động cơ do thiết kế từ tính mới với dạng nam châm được tối ưu hóa, góp phần bảo toàn năng lượng cho máy móc. Cuộn dây động cơ nhẹ hơn khoảng 12% * so với mô hình trước đó, điều này cũng góp phần tiết kiệm năng lượng để dẫn động phần chuyển động.
- * Đối với động cơ servo tuyến tính định mức 720 N

Tiết kiệm không gian
Đối với LM-H3, chiều rộng của cuộn dây động cơ và nam châm giảm 10% so với mô hình trước. Tỷ lệ lực đẩy trên dòng điện tăng lên dẫn đến việc sử dụng bộ khuếch đại servo với công suất nhỏ hơn, góp phần làm cho máy nhỏ gọn hơn (giảm vật liệu).

Môi trường
Điều kiện môi trường mở rộng
Có khả năng hoạt động ở độ cao 2000 m.
Tương thích với nguồn điện áp 240 V AC để sử dụng toàn cầu.
Tuân thủ chỉ thị RoHS.
Bộ khuếch đại servo với đặc điểm kỹ thuật phủ đặc biệt hiện đã có sẵn. Bộ khuếch đại servo này có khả năng chống ăn mòn được cải thiện trong môi trường có nồng độ khí ăn mòn, phù hợp với IEC 60721-3-3, Class 3C2. Để biết chi tiết, hãy liên hệ với văn phòng địa phương của bạn.
Tích hợp liền mạch với hệ thống hiện có
Thay thế dễ dàng Dòng MR-J3
Lắp tương thích
MR-J4-B / MR-J4-A có cùng kích thước lắp * 1 với MR-J3-B / MR-J3-A. Dòng động cơ servo quay HG có cùng kích thước lắp đặt * 2 và sử dụng cùng một loại cáp tùy chọn cho nguồn, bộ mã hóa * 3 và phanh điện từ như dòng HF hoặc dòng HC-RP / HC-UP.
* 1. Kích thước lắp đặt nhỏ hơn đối với bộ khuếch đại servo có công suất 200 V 5 kW, 400 V 3,5 kW, 200 V / 400 V 11 kW và 200 V / 400 V 15 kW.
* 2. Để thay thế dòng HA-LP thành dòng HG-JR, hãy liên hệ với văn phòng bán hàng tại địa phương của bạn để biết thêm chi tiết.
* 3. Dòng HG-JR từ 11 kW đến 55 kW sử dụng cáp mã hóa khác với dòng HF-JP.
Khi không thay đổi bộ điều khiển thành bộ điều khiển SSCNET III / H
Bộ khuếch đại servo MR-J4-B / MR-J4W2-B / MR-J4W3-B có chế độ tương thích J3. Bằng cách hoạt động ở chế độ tương thích J3, bộ khuếch đại servo dòng MR-J4 và bộ khuếch đại servo dòng MR-J3 có thể được sử dụng cùng nhau trong cùng một hệ thống mà không cần thay đổi bộ điều khiển hiện có.
* Khi có sản phẩm tương thích SSCNET III trong hệ thống, tốc độ truyền thông là 50 Mbps, chức năng và hiệu suất tương đương với MR-J3.
* Một số chức năng có thể không được hỗ trợ bởi chế độ tương thích J3. Tham khảo Hướng dẫn sử dụng Bộ khuếch đại Servo liên quan để biết thêm chi tiết.
Các chức năng mới sau đây của dòng MR-J4 khả dụng với chức năng mở rộng J3 của chế độ tương thích J3.
- · Chức năng điều chỉnh một chạm
- · Bộ lọc mạnh mẽ
- · Chức năng SEMI-F47
- · Chức năng ghi ổ đĩa
- · Chức năng giám sát nguồn điện
- · Kiểm soát chống rung nâng cao II
- · Bộ lọc triệt tiêu cộng hưởng máy (5 bộ lọc)
- · Chức năng ổ cứng
- · Chức năng chẩn đoán máy
- · Chức năng bù chuyển động bị mất

Chuyển đổi tham số
Các thông số được tự động chuyển đổi bằng cách thay đổi MR-J3-B thành MR-J4-B với MELSOFT MT Works2 * 1 . Các tham số MR-J3-A và MR-J3-T cũng có thể được chuyển đổi thành tham số MR-J4-A bằng cách sử dụng chức năng chuyển đổi tham số của MR Configurator2 * 1 .
* 1. Đảm bảo cập nhật MT Works2 và MR Configurator2 của bạn lên phiên bản mới nhất.
Đa dạng các dòng sản phẩm
Dòng MELSERVO-J3 có thể thay thế bằng dòng MELSERVO-J4 với nhiều loại nguồn và công suất. MR-J4-B / MR-J4-A có công suất từ 100 W đến 55 kW và nguồn điện mạch chính có thể lựa chọn từ 3 pha 200 V AC, 3 pha 400 V AC và 1 pha 100 V AC.
* Đối với các dòng sản phẩm, hãy tham khảo "Dòng Sản phẩm MELSERVO-J4" trong danh mục.
Hỗ trợ thay thế dòng MR-J2-Super
Các dòng sản phẩm dòng MELSERVO-J4 bao gồm giao diện đa năng, chức năng định vị và giao diện SSCNET III / H. Dòng MELSERVO-J4 tương thích với nhiều loại giao diện lệnh và cũng có thể thay thế từ dòng MELSERVO-J2S.
Để đổi mới các đơn vị thành dòng MR-J4
Các thông số được tự động chuyển đổi với MELSOFT MT Works2 * 1 khi bộ khuếch đại servo được thay đổi từ MR-J2S-B sang MR-J4-B.
Với chức năng chuyển đổi thông số của MR Configurator2 * 1 , các thông số của MR-J2S-A được chuyển đổi thành MR-J4-A và các thông số của MR-J2S-CP và MR-J2S-CL được chuyển đổi thành MR- J4-A-RJ.
* 1. Đảm bảo cập nhật MT Works2 và MR Configurator2 của bạn lên phiên bản mới nhất.

Khi không thay đổi bộ điều khiển thành bộ điều khiển SSCNET III / H
Một sự kết hợp của đơn vị chuyển đổi MR-J4-B-RJ020 và MR-J4-T20 cho SSCNET của MR-J2S-B có khả năng kết nối với SSCNET của MR-J2S-B điều khiển hệ thống servo tương thích. *
Như vậy, đổi mới các đơn vị có thể khác ngoài bộ điều khiển sang dòng MR-J4 mà không cần thay đổi bộ điều khiển hiện có.
* Chức năng và hiệu suất tương đương với MR-J2S-B. (Chế độ tương thích J2S)
* Tham khảo "Bản phát hành sản phẩm mới của thiết bị chuyển đổi cho SSCNET của MR-J2S-B" và "Hướng dẫn sử dụng bộ khuếch đại Servo MR-J4-_B_-RJ020 MR-J4-T20" để biết thêm chi tiết.
Bộ MR-J4-B-RJ020 và MR-J4-T20 tương thích với các bộ điều khiển hệ thống servo sau:
A171SHCPU (N), A172SHCPU (N), A173UHCPU, A273UHCPU,
A1SD75M, QD75M, Q172CPU (N) và Q173CPU (NS)
Khi sử dụng hệ thống dây hiện có
Công cụ gia hạn MR-J2S-B do Mitsubishi Electric
System & Service Co., Ltd. sản xuất có sẵn để sử dụng
động cơ servo dòng HC / HA hiện có hoặc để thay thế MR-J2S bằng các kết nối hiện có.
Công cụ đổi mới này cho phép sử dụng các lỗ lắp và hệ thống dây điện hiện có, đồng thời việc thay thế và đi dây có thể được hoàn thành trong một khoảng thời gian ngắn.
Để biết công cụ gia hạn MR-J2S, hãy liên hệ với văn phòng kinh doanh địa phương của bạn.
Vật liệu liên quan đến gia hạn
Chúng tôi cung cấp hỗ trợ cho việc đổi mới với các tài liệu sau đây từ danh mục giới thiệu đổi mới, sổ tay với thông tin chi tiết đến hướng dẫn sử dụng công cụ đổi mới để sử dụng hệ thống dây điện hiện có.

Dòng MR-J2S đã ngừng sản xuất từ tháng 8 năm 2015 và dòng MR-J3 / J3W đã ngừng sản xuất từ tháng 5 năm 2019.
Cung cấp các chức năng cơ bản khác nhau
Các chức năng cơ bản khác nhau
Kiểm soát vị trí / tốc độ / mô-men xoắn
Có sẵn các điều khiển vị trí, tốc độ và mô-men xoắn. Điều khiển vị trí thực hiện định vị bằng cách tuân theo các lệnh vị trí và phù hợp khi sử dụng điều khiển đồng bộ hoặc nội suy. Tốc độ và mô-men xoắn được điều khiển không đổi bằng các điều khiển tốc độ và mô-men xoắn tuân theo các lệnh tốc độ và mô-men xoắn tương ứng.
Điều khiển có thể được chuyển đổi giữa các điều khiển vị trí, tốc độ và mô-men xoắn.
* Điều khiển có thể được chuyển đổi giữa hai trong số các điều khiển cho MR-J4-A.
Tự động điều chỉnh thời gian thực
Tỷ lệ quán tính tải trên động cơ của một máy luôn được ước tính từ dòng điện và tốc độ của động cơ servo trong quá trình tăng / giảm tốc. Do đó, độ lợi như độ lợi vòng lặp mô hình, độ lợi vòng lặp vị trí và độ lợi vòng lặp tốc độ được thiết lập tự động chỉ bằng cách đặt mức phản hồi.
Mô hình điều khiển thích ứng
Điều khiển với độ nhạy cao và độ ổn định cao đạt được theo điều khiển mô hình.
Điều khiển thích ứng mô hình hai bậc tự do cho phép thiết lập phản ứng đối với lệnh và nhiễu tương ứng.
Bộ lọc thích ứng II là một chức năng trong đó bộ khuếch đại servo phát hiện hiện tượng cộng hưởng của máy trong một khoảng thời gian định trước và tự động đặt các đặc tính của bộ lọc để triệt tiêu rung động của hệ thống cơ học. Vì các đặc tính của bộ lọc (tần số và độ sâu) được thiết lập tự động, không cần thiết phải xem xét tần số cộng hưởng của hệ thống cơ học.
Chức năng này có hiệu quả đối với tần số cộng hưởng của máy tương đối cao, khoảng 100 Hz đến 2,25 kHz.
Bộ lọc thông thấp triệt tiêu cộng hưởng tần số cao xảy ra khi đáp ứng của hệ thống servo tăng lên. Bộ lọc được bật theo mặc định và tần số đặt được tự động điều chỉnh.
Phanh động được thiết kế để giảm tốc động cơ servo ngay lập tức khi có báo động, mất điện hoặc dừng cưỡng bức. Phanh động không dùng để giữ trục ở điểm dừng.
* Phanh động được tích hợp trong bộ khuếch đại servo 7 kW hoặc nhỏ hơn.
* Cần có phanh động bên ngoài đối với bộ khuếch đại servo 9 kW hoặc lớn hơn.
Có thể lắp gần cho bộ khuếch đại servo 200 V 3,5 kW hoặc nhỏ hơn, 100 V và 48 V DC / 24 V DC. Gắn kết không gian hiệu quả được cải thiện đáng kể.
* Khi bộ khuếch đại servo được gắn chặt chẽ, điều kiện môi trường hoạt động sẽ khác.
* Không thể lắp gần khi sử dụng bộ khuếch đại servo 1 kW và 2 kW ở loại 200 V với nguồn điện 1 pha.
Lựa chọn tín hiệu đầu vào (cài đặt thiết bị)
Chức năng được gán cho mỗi chân cho đầu vào kỹ thuật số có thể được thay đổi bằng cách cài đặt các thông số.
* Có sẵn với MR-J4-GF và MR-J4-A.
Lựa chọn tín hiệu đầu ra (cài đặt thiết bị)
Chức năng được gán cho mỗi chân cho đầu ra kỹ thuật số có thể được thay đổi bằng cách cài đặt các thông số.
Các xung đầu ra của bộ mã hóa có thể được xuất ra trong loại trình điều khiển dòng vi sai dưới dạng xung pha A / B / Z. Có thể cài đặt xung đầu ra cho mỗi vòng quay động cơ servo với tham số này.
* MR-J4W2-B xuất ra xung pha A / B. MR-J4W3-B không tương thích với chức năng này.
A / B - xung pha thông qua đầu ra
Với chức năng này, khi sử dụng bộ mã hóa tuyến tính loại đầu ra vi sai pha A / B / Z, tín hiệu pha A / B / Z từ bộ mã hóa tuyến tính được xuất ra dưới dạng xung đầu ra của bộ mã hóa.
Các tín hiệu từ bộ mã hóa tuyến tính được sử dụng bởi một bộ điều khiển mà không bị phân nhánh.
* Chỉ khả dụng với MR-J4-GF-RJ / MR-J4-B-RJ / MR-J4-A-RJ.
Giám sát (Hiển thị trạng thái)
Trạng thái servo như tỷ lệ tải phục hồi, tỷ lệ tải hiệu dụng, mô-men xoắn tức thời hoặc tốc độ động cơ servo có thể được theo dõi trên MR Configurator2. Đối với MR-J4-A, trạng thái cũng được xác nhận trên màn hình LED bảy đoạn.
Chức năng này triệt tiêu rung động của ± 1 xung được tạo ra khi dừng động cơ servo.
Đạt được chức năng chuyển đổi
Chức năng này cho phép chuyển đổi lợi ích. Lợi ích trong quá trình quay và trong khi dừng có thể được chuyển đổi. Cũng có thể sử dụng tín hiệu chuyển mạch để chuyển đổi lợi ích trong quá trình hoạt động.
Với chức năng này, độ lệch vị trí được giảm xuống gần bằng không trong quá trình vận hành vận tốc không đổi.
Chức năng này cải thiện việc theo dõi lệnh vị trí trong quá trình điều khiển quỹ đạo, v.v.
Tối đa bảy lệnh tốc độ nội bộ có thể được lưu trữ trong các tham số. Có thể điều khiển tốc độ mà không cần sử dụng lệnh điện áp tương tự bằng cách chọn lệnh tốc độ bên trong với thiết bị đầu vào.
* Chỉ được hỗ trợ bởi MR-J4-A.
Hệ thống phát hiện vị trí tuyệt đối
Chỉ thiết lập vị trí nhà một lần khiến vị trí nhà trở lại không cần thiết ở mỗi lần bật nguồn.
Điện trở phục hồi tích hợp
Bộ khuếch đại servo từ 0,2 kW đến 7 kW có điện trở phục hồi tích hợp, tiết kiệm không gian lắp đặt cho một tùy chọn và cho phép hệ thống nhỏ gọn hơn.
Sử dụng tùy chọn phục hồi khi điện trở phục hồi tích hợp của bộ khuếch đại servo không có đủ khả năng phục hồi. Đối với bộ khuếch đại servo 5 kW hoặc lớn hơn, bộ hãm khả dụng khi tùy chọn phục hồi không cung cấp đủ công suất phục hồi.
* Có sẵn như một tùy chọn.
Bộ chuyển đổi tái tạo năng lượng
Năng lượng tái tạo được trả lại cho nguồn điện và được sử dụng cho các hệ thống khác, góp phần tiết kiệm năng lượng.
Bộ chuyển đổi tái tạo nguồn MR-CV_ tương thích với bộ truyền động MR-J4-DU_B _ (- RJ) và bộ khuếch đại servo MR-J4-_B _ (- RJ). Bộ chuyển đổi tái sinh đa năng FR-XC tương thích với các bộ khuếch đại servo từ 100 W đến 22 kW ở loại 200 V và 0,6 kW đến 22 kW ở loại 400 V.
Trạng thái servo như mô-men xoắn và tốc độ động cơ servo được xuất ra dưới dạng điện áp trong thời gian thực.
* Không khả dụng với MR-J4W2-B / MR-J4-W3-B.
16 lần báo động trước đây được ghi lại trong bộ khuếch đại servo. Các báo động có thể được kiểm tra trong danh sách với MR Configurator2.
Trước khi bắt đầu vận hành thực tế, thực hiện vận hành thử nghiệm để đảm bảo rằng máy hoạt động bình thường. Những điều sau có thể được thực hiện bằng MR Configurator2.
● Vận hành JOG
Chức năng vận hành thử nghiệm để kiểm tra hoạt động điều khiển tốc độ mà không cần lệnh từ bộ điều khiển.
● Vận hành định vị Chức năng vận hành
thử để kiểm tra hoạt động định vị bằng điều khiển vị trí mà không cần lệnh từ bộ điều khiển.
● Hoạt động
không cần động cơ Nếu không kết nối động cơ servo, chức năng này xuất tín hiệu phản hồi với thiết bị đầu vào và hiển thị trạng thái như thể động cơ servo đang thực sự chạy. Hoạt động không sử dụng động cơ rất hữu ích để kiểm tra trình tự của bộ điều khiển, v.v.
● Hoạt động chương trình
Không cần sử dụng bộ điều khiển, chức năng này cho phép hoạt động định vị bao gồm nhiều mẫu hoạt động đơn giản.
● Ngõ ra cưỡng bức tín hiệu đầu ra (DO)
Chức năng này bật / tắt cưỡng bức tín hiệu đầu ra độc lập với trạng thái servo, hữu ích để kiểm tra dây tín hiệu đầu ra.
Chức năng điều chỉnh nhiều trục
Chức năng này đồng thời điều chỉnh các trục truyền động song song tạo ra chuyển động giống nhau, đồng thời thực hiện hoạt động thử nghiệm và điều chỉnh tăng lên đến bốn trục cùng một lúc. Các trục mục tiêu có thể được chọn bằng một thao tác đơn giản trên phần mềm kỹ thuật.
* Chức năng này khả dụng khi bộ khuếch đại servo được sử dụng với RnMTCPU hoặc RD77MS.
Chức năng kiểm soát áp suất
Tín hiệu cảm biến áp suất được đưa trực tiếp vào bộ khuếch đại servo, cho phép điều khiển phản hồi phản hồi cao và điều khiển áp suất.
* Bộ khuếch đại servo tương thích với điều khiển áp suất (MR-J4-B-LL) là cần thiết.
Được trang bị bộ mã hóa vị trí tuyệt đối độ phân giải cao
Động cơ servo được trang bị bộ mã hóa vị trí tuyệt đối có độ phân giải cao là 4.194.304 xung / vòng (22-bit) theo tiêu chuẩn. Độ chính xác của vị trí được tăng lên.
- * 262.144 xung / vòng (18-bit) cho dòng HG-AK.
Cải thiện sức đề kháng với môi trường
Bảo vệ chống xâm nhập * 2 của động cơ servo: HG-KR / HG-MR / HG-RR / HG-UR: IP65
HG-SR / HG-JR: IP67 * 1
HG-AK: IP55
- * 1. Dòng HG-JR 1000 vòng / phút 15 kW trở lên, dòng HG-JR 1500 vòng / phút 22 kW trở lên và dòng HG-JR 2000 vòng / phút được xếp hạng IP44.
- * 2. Phần xuyên qua trục bị loại trừ.
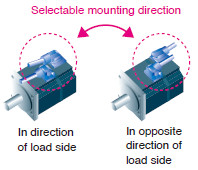
Hướng dẫn cáp
Cáp cho nguồn, bộ mã hóa và phanh điện từ có thể được kết nối theo hướng hoặc ngược hướng của phía tải, tùy thuộc vào việc lựa chọn cáp. (Dòng HG-KR và HG-MR)
Giảm mômen xoắn trong quá trình dẫn
■ Mô-men xoắn gợn sóng
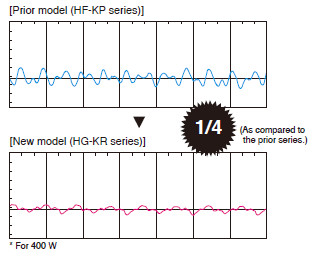
Độ gợn sóng mô-men xoắn được giảm bớt nhờ sự kết hợp tối ưu giữa số cực của động cơ và các rãnh. Do đó, đạt được chuyển động quay trơn tru ngay cả khi vận hành ở tốc độ thấp, vốn có nhiều khả năng bị ảnh hưởng bởi gợn mô-men xoắn, cải thiện độ ổn định khi vận hành.
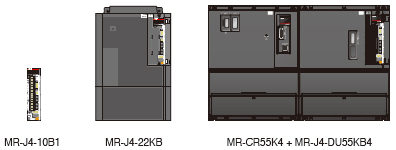
Dòng sản phẩm
- • Động cơ servo công suất cực lớn với chức năng an toàn
HG-JR_K24W0C loại 400 V: 110 kW, 150 kW, 180 kW, 200 kW, 220 kW
- • Bộ truyền động cho động cơ servo công suất cực lớn
MR-J4-DU_KB4-RJ100 400 V class: 45 kW và 55 kW
Đặc trưng
- • Động cơ servo có chức năng an
toàn Mức độ an toàn là Loại 4 PL e, SIL 3 với sự kết hợp với bộ an toàn chức năng MR-D30.
- • Hệ thống servo dung lượng cực lớn có thể được cấu hình với nhiều bộ truyền động điều khiển mô tơ servo song song.
Lý tưởng để tăng công suất máy và thay thế các hệ thống thủy lực thông thường
Động cơ servo công suất cực lớn được điều khiển bởi hai hoặc bốn bộ bộ chuyển đổi tái tạo năng lượng MR-CV55K4 và bộ truyền động
MR-J4-DU_KB4-RJ100 được kết nối song song .
Sử dụng hệ thống tái tạo năng lượng, các bộ chuyển đổi sử dụng hiệu quả năng lượng tái tạo và hỗ trợ hệ thống tiết kiệm điện.
• Ví dụ về cấu hình hệ thống truyền động song song

Hệ thống truyền động song song
Bộ chuyển đổi và bộ truyền động được sử dụng như một sự kết hợp. Hai hoặc bốn bộ này dẫn động song song động cơ servo công suất cực lớn từ 110 kW đến 220 kW.

Giao tiếp đồng bộ chính xác cao của SSCNET III / H cho phép tạo ra hệ thống truyền động song song dung lượng lớn.
• Thời gian xử lý bộ khuếch đại servo


Kết nối bộ mã hóa đơn giản
Bộ truyền động và động cơ servo cung cấp kết nối dễ dàng, tiết kiệm chi phí với ít dây cáp hơn. Các bộ truyền động được kết nối với cáp bộ mã hóa chuỗi daisy và thông tin bộ mã hóa được gửi từ bộ khuếch đại servo chính của bộ mã hóa đến tất cả các bộ khuếch đại servo phụ của bộ mã hóa mà không có bộ phân phối bộ mã hóa.
Ngoài ra, dây tín hiệu nhiệt điện trở được bao gồm trong cáp bộ mã hóa, và do đó dây bổ sung cho tín hiệu điện trở nhiệt là không cần thiết nữa. Kết nối đơn giản giúp giảm thiểu sự phức tạp và sai sót.

Động cơ Servo tốc độ cao, mô-men xoắn cao
Cấu trúc rôto của động cơ servo được tối ưu hóa để cung cấp hoạt động tốc độ cao, mô-men xoắn cao. Bộ truyền động nhanh, gia tốc cao giúp rút ngắn thời gian định vị và nâng cao năng suất của bạn.

- * Ví dụ về HG-JR220K24W0C
Tăng mức độ an toàn
Động cơ servo HG-JR_K24W0C được trang bị bộ mã hóa với mức độ an toàn được cải thiện.
Việc sử dụng bộ truyền động, bộ an toàn chức năng MR-D30 và động cơ servo có chức năng an toàn cung cấp mức độ an toàn lên đến Loại 4 PL e, SIL 3 và các chức năng sau: Tắt mô-men xoắn an toàn, Dừng an toàn 1, Dừng an toàn 2, Dừng vận hành an toàn, Giới hạn tốc độ an toàn, Kiểm soát phanh an toàn và Giám sát tốc độ an toàn.

- * Tham khảo "Hướng dẫn sử dụng bộ truyền động MR-J4-DU_B4-RJ100" để biết chi tiết về cách sử dụng bộ an toàn chức năng MR-D30 kết hợp với bộ truyền động.
Lớp ngắn nhất trong ngành
Quạt làm mát được gắn trên các mặt của động cơ servo, làm cho chiều dài động cơ ngắn hơn bao giờ hết. Lớp học ngắn nhất của ngành đã đạt được.

- * Ví dụ về HG-JR220K24W0C
Ví dụ ứng dụng
Một loạt công suất của động cơ servo cực lớn hỗ trợ tăng công suất máy và thay thế hệ thống thủy lực thông thường của bạn bằng hệ thống điện.
Máy ép

Máy đúc

Máy xúc, máy bốc dỡ và máy tiếp liệu

Hệ thống xử lý vật liệu

Máy kiểm tra độ rung

Spin áo khoác

Chỉ định mô hình cho loại 200 V (Lưu ý 11)
Đối với lớp 200 V
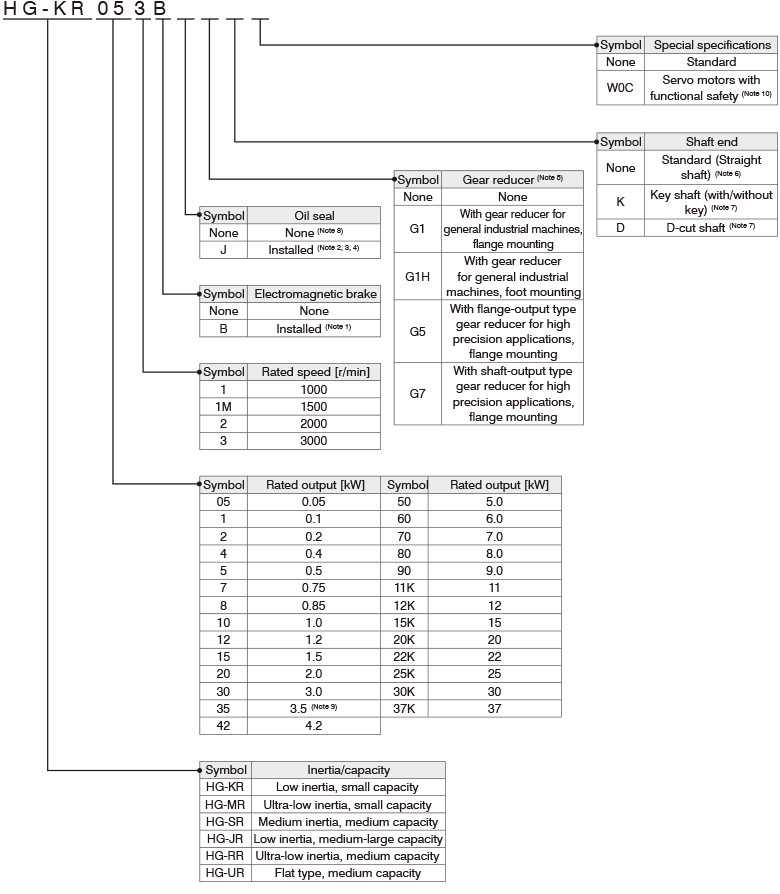
- Ghi chú:
- Tham khảo thông số kỹ thuật phanh điện từ của từng dòng động cơ servo trong danh mục MR-J4 để biết các mẫu có sẵn và thông số kỹ thuật chi tiết.
- Có sẵn trong các dòng HG-KR / HG-MR 0,1 kW hoặc lớn hơn và tất cả các dòng HG-SR.
- Phớt dầu không được lắp vào động cơ servo có giảm tốc.
- Kích thước của dòng HG-KR / HG-MR có phớt dầu khác với dòng không có phớt dầu. Liên hệ với văn phòng kinh doanh địa phương của bạn để biết thêm chi tiết. Đối với dòng HG-SR, các kích thước giống nhau bất kể có lắp phớt dầu hay không.
- Tham khảo "Thông số kỹ thuật động cơ Servo giảm tốc" trong danh mục MR-J4 để biết các mẫu có sẵn và thông số kỹ thuật chi tiết.
- Tiêu chuẩn HG-SR G1 / G1H có trục then hoa (có chìa khóa).
- Tham khảo thông số kỹ thuật đầu trục đặc biệt của từng dòng động cơ servo trong danh mục MR-J4 để biết các mẫu có sẵn và thông số kỹ thuật chi tiết.
- Phớt dầu được lắp đặt tiêu chuẩn cho các dòng HG-JR, HG-RR và HG-UR.
- Đối với HG-JR353 (B), đầu ra định mức thay đổi tùy thuộc vào bộ khuếch đại servo được kết hợp. Tham khảo "Thông số kỹ thuật của Dòng HG-JR 3000 vòng / phút (Quán tính thấp, Công suất trung bình) (Loại 200 V)" trong danh mục MR-J4 để biết thêm chi tiết.
- Liên hệ với văn phòng bán hàng tại địa phương của bạn để biết các động cơ servo có chức năng an toàn.
- Phần này mô tả những gì mỗi ký hiệu trong tên mô hình chỉ ra. Một số kết hợp của các ký hiệu không có sẵn.
Chỉ định mô hình cho lớp 400 V (Lưu ý 10)
Đối với lớp 400 V
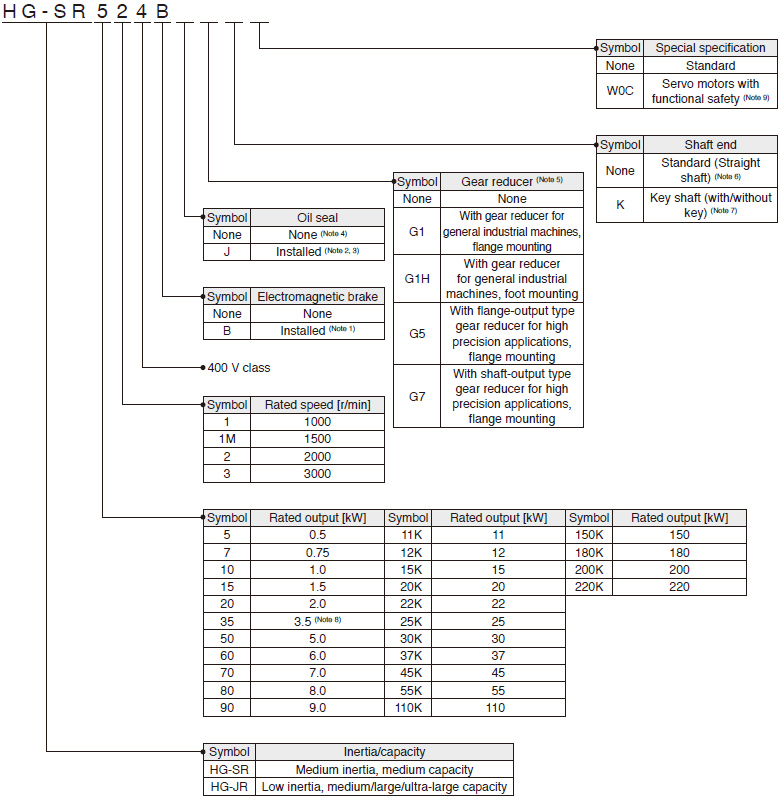
- Ghi chú:
- Tham khảo thông số kỹ thuật phanh điện từ của từng dòng động cơ servo trong danh mục MR-J4 để biết các mẫu có sẵn và thông số kỹ thuật chi tiết.
- Có sẵn trong dòng HG-SR.
- Phớt dầu không được lắp vào động cơ servo có giảm tốc.
- Phớt dầu được lắp đặt tiêu chuẩn trong dòng HG-JR.
- Tham khảo "Thông số kỹ thuật động cơ Servo giảm tốc" trong danh mục MR-J4 để biết các mẫu có sẵn và thông số kỹ thuật chi tiết.
- Tiêu chuẩn HG-SR G1 / G1H có trục then hoa (có chìa khóa).
- Tham khảo thông số kỹ thuật đầu trục đặc biệt của từng dòng động cơ servo trong danh mục MR-J4 để biết các mẫu có sẵn và thông số kỹ thuật chi tiết.
- Đối với HG-JR3534 (B), đầu ra định mức thay đổi tùy thuộc vào bộ khuếch đại servo được kết hợp. Tham khảo "Thông số kỹ thuật của Dòng HG-JR 3000 vòng / phút (Quán tính thấp, Công suất trung bình) (Loại 400 V)" trong danh mục MR-J4 để biết thêm chi tiết.
- Liên hệ với văn phòng bán hàng tại địa phương của bạn để biết các động cơ servo có chức năng an toàn.
- Phần này mô tả những gì mỗi ký hiệu trong tên mô hình chỉ ra. Một số kết hợp của các ký hiệu không có sẵn.
Chỉ định mẫu cho 48 V DC / 24 V DC (Lưu ý 3)
Đối với 48 V DC / 24 V DC
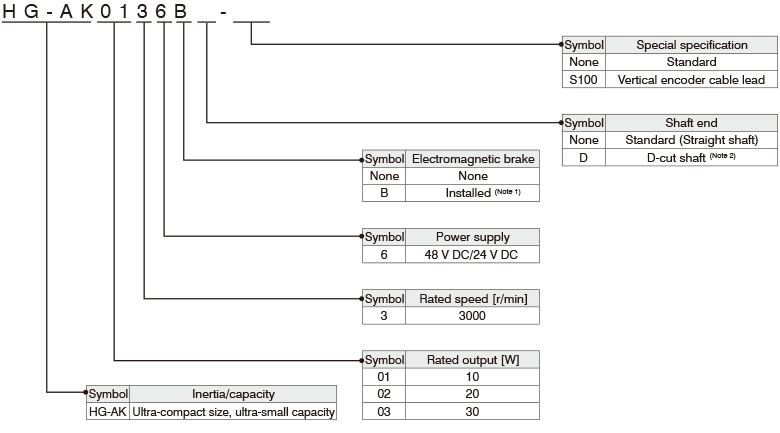
- Ghi chú:
- Tham khảo "Thông số kỹ thuật phanh điện từ dòng HG-AK" trong danh mục MR-J4 để biết các kiểu xe có sẵn và thông số kỹ thuật chi tiết.
- Tham khảo "Thông số kỹ thuật đầu trục đặc biệt của dòng HG-AK" trong danh mục MR-J4 để biết thêm chi tiết.
- Phần này mô tả những gì mỗi ký hiệu trong tên mô hình chỉ ra. Một số kết hợp của các ký hiệu không có sẵn.
- Kết hợp
-
Sự kết hợp của Động cơ Servo quay và Bộ khuếch đại Servo (Loại 200 V / 100 V)
| Động cơ servo quay |
Bộ khuếch đại servo |
| MR-J4 |
MR-J4W2 (Lưu ý 1) |
MR-J4W3 (Lưu ý 1) |
HG-KR
loạt |
HG-KR053 (B) |
MR-J4-10GF (-RJ), MR-J4-10GF1 (-RJ),
MR-J4-10B (-RJ), MR-J4-10B1 (-RJ),
MR-J4-10A (-RJ), MR-J4-10A1 (-RJ) |
MR-J4W2-22B,
MR-J4W2-44B |
MR-J4W3-222B,
MR-J4W3-444B |
| HG-KR13 (B) |
MR-J4-10GF (-RJ), MR-J4-10GF1 (-RJ),
MR-J4-10B (-RJ), MR-J4-10B1 (-RJ),
MR-J4-10A (-RJ), MR-J4-10A1 (-RJ) |
MR-J4W2-22B,
MR-J4W2-44B |
MR-J4W3-222B,
MR-J4W3-444B |
| HG-KR23 (B) |
MR-J4-20GF (-RJ), MR-J4-20GF1 (-RJ),
MR-J4-20B (-RJ), MR-J4-20B1 (-RJ),
MR-J4-20A (-RJ), MR-J4-20A1 (-RJ) |
MR-J4W2-22B,
MR-J4W2-44B |
MR-J4W3-222B,
MR-J4W3-444B |
| HG-KR43 (B) |
MR-J4-40GF (-RJ), MR-J4-40GF1 (-RJ),
MR-J4-40B (-RJ), MR-J4-40B1 (-RJ),
MR-J4-40A (-RJ), MR-J4-40A1 (-RJ) |
MR-J4W2-44B,
MR-J4W2-77B,
MR-J4W2-1010B |
MR-J4W3-444B |
| HG-KR73 (B) |
MR-J4-70GF (-RJ), MR-J4-70B (-RJ),
MR-J4-70A (-RJ) |
MR-J4W2-77B,
MR-J4W2-1010B |
- |
HG-MR
loạt |
HG-MR053 (B) |
MR-J4-10GF (-RJ), MR-J4-10GF1 (-RJ),
MR-J4-10B (-RJ), MR-J4-10B1 (-RJ),
MR-J4-10A (-RJ), MR-J4-10A1 (-RJ) |
MR-J4W2-22B,
MR-J4W2-44B |
MR-J4W3-222B,
MR-J4W3-444B |
| HG-MR13 (B) |
MR-J4-10GF (-RJ), MR-J4-10GF1 (-RJ),
MR-J4-10B (-RJ), MR-J4-10B1 (-RJ),
MR-J4-10A (-RJ), MR-J4-10A1 (-RJ) |
MR-J4W2-22B,
MR-J4W2-44B |
MR-J4W3-222B,
MR-J4W3-444B |
| HG-MR23 (B) |
MR-J4-20GF (-RJ), MR-J4-20GF1 (-RJ),
MR-J4-20B (-RJ), MR-J4-20B1 (-RJ),
MR-J4-20A (-RJ), MR-J4-20A1 (-RJ) |
MR-J4W2-22B,
MR-J4W2-44B |
MR-J4W3-222B,
MR-J4W3-444B |
| HG-MR43 (B) |
MR-J4-40GF (-RJ), MR-J4-40GF1 (-RJ),
MR-J4-40B (-RJ), MR-J4-40B1 (-RJ),
MR-J4-40A (-RJ), MR-J4-40A1 (-RJ) |
MR-J4W2-44B,
MR-J4W2-77B,
MR-J4W2-1010B |
MR-J4W3-444B |
| HG-MR73 (B) |
MR-J4-70GF (-RJ), MR-J4-70B (-RJ),
MR-J4-70A (-RJ) |
MR-J4W2-77B,
MR-J4W2-1010B |
- |
HG-SR
1000 r / min
loạt |
HG-SR51 (B) |
MR-J4-60GF (-RJ), MR-J4-60B (-RJ),
MR-J4-60A (-RJ) |
MR-J4W2-77B,
MR-J4W2-1010B |
- |
| HG-SR81 (B) |
MR-J4-100GF (-RJ), MR-J4-100B (-RJ),
MR-J4-100A (-RJ) |
MR-J4W2-1010B |
- |
| HG-SR121 (B) |
MR-J4-200GF (-RJ), MR-J4-200B (-RJ),
MR-J4-200A (-RJ) |
- |
- |
| HG-SR201 (B) |
MR-J4-200GF (-RJ), MR-J4-200B (-RJ),
MR-J4-200A (-RJ) |
- |
- |
| HG-SR301 (B) |
MR-J4-350GF (-RJ), MR-J4-350B (-RJ),
MR-J4-350A (-RJ) |
- |
- |
| HG-SR421 (B) |
MR-J4-500GF (-RJ), MR-J4-500B (-RJ),
MR-J4-500A (-RJ) |
- |
- |
HG-SR
2000 r / min
loạt |
HG-SR52 (B) |
MR-J4-60GF (-RJ), MR-J4-60B (-RJ),
MR-J4-60A (-RJ) |
MR-J4W2-77B,
MR-J4W2-1010B |
- |
| HG-SR102 (B) |
MR-J4-100GF (-RJ), MR-J4-100B (-RJ),
MR-J4-100A (-RJ) |
MR-J4W2-1010B |
- |
| HG-SR152 (B) |
MR-J4-200GF (-RJ), MR-J4-200B (-RJ),
MR-J4-200A (-RJ) |
- |
- |
| HG-SR202 (B) |
MR-J4-200GF (-RJ), MR-J4-200B (-RJ),
MR-J4-200A (-RJ) |
- |
- |
| HG-SR352 (B) |
MR-J4-350GF (-RJ), MR-J4-350B (-RJ),
MR-J4-350A (-RJ) |
- |
- |
| HG-SR502 (B) |
MR-J4-500GF (-RJ), MR-J4-500B (-RJ),
MR-J4-500A (-RJ) |
- |
- |
| HG-SR702 (B) |
MR-J4-700GF (-RJ), MR-J4-700B (-RJ),
MR-J4-DU900B (-RJ), MR-J4-700A (-RJ) |
- |
- |
HG-JR
3000 r / min
loạt |
HG-JR53 (B) |
MR-J4-60GF (-RJ), MR-J4-60B (-RJ),
MR-J4-60A (-RJ) |
MR-J4W2-77B |
- |
| HG-JR73 (B) |
MR-J4-70GF (-RJ), MR-J4-70B (-RJ),
MR-J4-70A (-RJ) |
MR-J4W2-77B,
MR-J4W2-1010B |
- |
| HG-JR103 (B) |
MR-J4-100GF (-RJ), MR-J4-100B (-RJ),
MR-J4-100A (-RJ) |
MR-J4W2-1010B |
- |
- Ghi chú:
-
Sự kết hợp của Động cơ Servo quay và Bộ khuếch đại Servo (Loại 200 V)
| Động cơ servo quay |
Bộ khuếch đại / bộ truyền động servo |
| MR-J4 |
MR-J4W2 (Lưu ý 1) |
MR-J4W3 |
HG-JR
3000 r / min
loạt |
HG-JR153 (B) |
MR-J4-200GF (-RJ), MR-J4-200B (-RJ),
MR-J4-200A (-RJ) |
- |
- |
| HG-JR203 (B) |
MR-J4-200GF (-RJ), MR-J4-200B (-RJ),
MR-J4-200A (-RJ) |
- |
- |
| HG-JR353 (B) |
MR-J4-350GF (-RJ), MR-J4-350B (-RJ),
MR-J4-350A (-RJ) |
- |
- |
| HG-JR503 (B) |
MR-J4-500GF (-RJ), MR-J4-500B (-RJ),
MR-J4-500A (-RJ) |
- |
- |
| HG-JR703 (B) |
MR-J4-700GF (-RJ), MR-J4-700B (-RJ),
MR-J4-DU900B (-RJ), MR-J4-700A (-RJ) |
- |
- |
| HG-JR903 (B) |
MR-J4-11KGF (-RJ), MR-J4-11KB (-RJ),
MR-J4-DU900B (-RJ), MR-J4-11KA (-RJ) |
- |
- |
HG-JR
1000 r / min
loạt |
HG-JR601 (B) |
MR-J4-700GF (-RJ), MR-J4-700B (-RJ),
MR-J4-DU900B (-RJ), MR-J4-700A (-RJ) |
- |
- |
| HG-JR801 (B) |
MR-J4-11KGF (-RJ), MR-J4-11KB (-RJ),
MR-J4-DU900B (-RJ), MR-J4-11KA (-RJ) |
- |
- |
| HG-JR12K1 (B) |
MR-J4-11KGF (-RJ), MR-J4-11KB (-RJ),
MR-J4-DU11KB (-RJ), MR-J4-11KA (-RJ) |
- |
- |
| HG-JR15K1 |
MR-J4-15KGF (-RJ), MR-J4-15KB (-RJ),
MR-J4-DU15KB (-RJ), MR-J4-15KA (-RJ) |
- |
- |
| HG-JR20K1 |
MR-J4-22KGF (-RJ), MR-J4-22KB (-RJ),
MR-J4-DU22KB (-RJ), MR-J4-22KA (-RJ) |
- |
- |
| HG-JR25K1 |
MR-J4-22KGF (-RJ), MR-J4-22KB (-RJ),
MR-J4-DU22KB (-RJ), MR-J4-22KA (-RJ) |
- |
- |
| HG-JR30K1 |
MR-J4-DU30KB (-RJ),
MR-J4-DU30KA (-RJ) |
- |
- |
| HG-JR37K1 |
MR-J4-DU37KB (-RJ),
MR-J4-DU37KA (-RJ) |
- |
- |
HG-JR
1500 r / min
loạt |
HG-JR701M (B) |
MR-J4-700GF (-RJ), MR-J4-700B (-RJ),
MR-J4-DU900B (-RJ), MR-J4-700A (-RJ) |
- |
- |
| HG-JR11K1M (B) |
MR-J4-11KGF (-RJ), MR-J4-11KB (-RJ),
MR-J4-DU11KB (-RJ), MR-J4-11KA (-RJ) |
- |
- |
| HG-JR15K1M (B) |
MR-J4-15KGF (-RJ), MR-J4-15KB (-RJ),
MR-J4-DU15KB (-RJ), MR-J4-15KA (-RJ) |
- |
- |
| HG-JR22K1M |
MR-J4-22KGF (-RJ), MR-J4-22KB (-RJ),
MR-J4-DU22KB (-RJ), MR-J4-22KA (-RJ) |
- |
- |
| HG-JR30K1M |
MR-J4-DU30KB (-RJ),
MR-J4-DU30KA (-RJ) |
- |
- |
| HG-JR37K1M |
MR-J4-DU37KB (-RJ),
MR-J4-DU37KA (-RJ) |
- |
- |
HG-RR
loạt |
HG-RR103 (B) |
MR-J4-200GF (-RJ), MR-J4-200B (-RJ),
MR-J4-200A (-RJ) |
- |
- |
| HG-RR153 (B) |
MR-J4-200GF (-RJ), MR-J4-200B (-RJ),
MR-J4-200A (-RJ) |
- |
- |
| HG-RR203 (B) |
MR-J4-350GF (-RJ), MR-J4-350B (-RJ),
MR-J4-350A (-RJ) |
- |
- |
| HG-RR353 (B) |
MR-J4-500GF (-RJ), MR-J4-500B (-RJ),
MR-J4-500A (-RJ) |
- |
- |
| HG-RR503 (B) |
MR-J4-500GF (-RJ), MR-J4-500B (-RJ),
MR-J4-500A (-RJ) |
- |
- |
HG-UR
loạt |
HG-UR72 (B) |
MR-J4-70GF (-RJ), MR-J4-70B (-RJ),
MR-J4-70A (-RJ) |
MR-J4W2-77B
MR-J4W2-1010B |
- |
| HG-UR152 (B) |
MR-J4-200GF (-RJ), MR-J4-200B (-RJ),
MR-J4-200A (-RJ) |
- |
- |
| HG-UR202 (B) |
MR-J4-350GF (-RJ), MR-J4-350B (-RJ),
MR-J4-350A (-RJ) |
- |
- |
| HG-UR352 (B) |
MR-J4-500GF (-RJ), MR-J4-500B (-RJ),
MR-J4-500A (-RJ) |
- |
- |
| HG-UR502 (B) |
MR-J4-500GF (-RJ), MR-J4-500B (-RJ),
MR-J4-500A (-RJ) |
- |
- |
- Ghi chú:
-
Sự kết hợp của Động cơ Servo quay và Bộ khuếch đại Servo (Loại 400 V)
| Động cơ servo quay |
Bộ khuếch đại / bộ truyền động servo |
| MR-J4 |
MR-J4W2 |
MR-J4W3 |
HG-SR
2000 r / min
loạt |
HG-SR524 (B) |
MR-J4-60GF4 (-RJ), MR-J4-60B4 (-RJ),
MR-J4-60A4 (-RJ) |
- |
- |
| HG-SR1024 (B) |
MR-J4-100GF4 (-RJ), MR-J4-100B4 (-RJ),
MR-J4-100A4 (-RJ) |
- |
- |
| HG-SR1524 (B) |
MR-J4-200GF4 (-RJ), MR-J4-200B4 (-RJ),
MR-J4-200A4 (-RJ) |
- |
- |
| HG-SR2024 (B) |
MR-J4-200GF4 (-RJ), MR-J4-200B4 (-RJ),
MR-J4-200A4 (-RJ) |
- |
- |
| HG-SR3524 (B) |
MR-J4-350GF4 (-RJ), MR-J4-350B4 (-RJ),
MR-J4-350A4 (-RJ) |
- |
- |
| HG-SR5024 (B) |
MR-J4-500GF4 (-RJ), MR-J4-500B4 (-RJ),
MR-J4-500A4 (-RJ) |
- |
- |
| HG-SR7024 (B) |
MR-J4-700GF4 (-RJ), MR-J4-700B4 (-RJ),
MR-J4-DU900B4 (-RJ), MR-J4-700A4 (-RJ) |
- |
- |
HG-JR
3000 r / min
loạt |
HG-JR534 (B) |
MR-J4-60GF4 (-RJ), MR-J4-60B4 (-RJ),
MR-J4-60A4 (-RJ) |
- |
- |
| HG-JR734 (B) |
MR-J4-100GF4 (-RJ), MR-J4-100B4 (-RJ),
MR-J4-100A4 (-RJ) |
- |
- |
| HG-JR1034 (B) |
MR-J4-100GF4 (-RJ), MR-J4-100B4 (-RJ),
MR-J4-100A4 (-RJ) |
- |
- |
| HG-JR1534 (B) |
MR-J4-200GF4 (-RJ), MR-J4-200B4 (-RJ),
MR-J4-200A4 (-RJ) |
- |
- |
| HG-JR2034 (B) |
MR-J4-200GF4 (-RJ), MR-J4-200B4 (-RJ),
MR-J4-200A4 (-RJ) |
- |
- |
| HG-JR3534 (B) |
MR-J4-350GF4 (-RJ), MR-J4-350B4 (-RJ),
MR-J4-350A4 (-RJ) |
- |
- |
| HG-JR5034 (B) |
MR-J4-500GF4 (-RJ), MR-J4-500B4 (-RJ),
MR-J4-500A4 (-RJ) |
- |
- |
| HG-JR7034 (B) |
MR-J4-700GF4 (-RJ), MR-J4-700B4 (-RJ),
MR-J4-DU900B4 (-RJ), MR-J4-700A4 (-RJ) |
- |
- |
| HG-JR9034 (B) |
MR-J4-11KGF4 (-RJ), MR-J4-11KB4 (-RJ),
MR-J4-DU900B4 (-RJ), MR-J4-11KA4 (-RJ) |
- |
- |
HG-JR
1000 r / min
loạt |
HG-JR6014 (B) |
MR-J4-700GF4 (-RJ), MR-J4-700B4 (-RJ),
MR-J4-DU900B4 (-RJ), MR-J4-700A4 (-RJ) |
- |
- |
| HG-JR8014 (B) |
MR-J4-11KGF4 (-RJ), MR-J4-11KB4 (-RJ),
MR-J4-DU900B4 (-RJ), MR-J4-11KA4 (-RJ) |
- |
- |
| HG-JR12K14 (B) |
MR-J4-11KGF4 (-RJ), MR-J4-11KB4 (-RJ),
MR-J4-DU11KB4 (-RJ), MR-J4-11KA4 (-RJ) |
- |
- |
| HG-JR15K14 |
MR-J4-15KGF4 (-RJ), MR-J4-15KB4 (-RJ),
MR-J4-DU15KB4 (-RJ), MR-J4-15KA4 (-RJ) |
- |
- |
| HG-JR20K14 |
MR-J4-22KGF4 (-RJ), MR-J4-22KB4 (-RJ),
MR-J4-DU22KB4 (-RJ), MR-J4-22KA4 (-RJ) |
- |
- |
| HG-JR25K14 |
MR-J4-22KGF4 (-RJ), MR-J4-22KB4 (-RJ),
MR-J4-DU22KB4 (-RJ), MR-J4-22KA4 (-RJ) |
- |
- |
| HG-JR30K14 |
MR-J4-DU30KB4 (-RJ),
MR-J4-DU30KA4 (-RJ) |
- |
- |
| HG-JR37K14 |
MR-J4-DU37KB4 (-RJ),
MR-J4-DU37KA4 (-RJ) |
- |
- |
HG-JR
1500 r / min
loạt |
HG-JR701M4 (B) |
MR-J4-700GF4 (-RJ), MR-J4-700B4 (-RJ),
MR-J4-DU900B4 (-RJ), MR-J4-700A4 (-RJ) |
- |
- |
| HG-JR11K1M4 (B) |
MR-J4-11KGF4 (-RJ), MR-J4-11KB4 (-RJ),
MR-J4-DU11KB4 (-RJ), MR-J4-11KA4 (-RJ) |
- |
- |
| HG-JR15K1M4 (B) |
MR-J4-15KGF4 (-RJ), MR-J4-15KB4 (-RJ),
MR-J4-DU15KB4 (-RJ), MR-J4-15KA4 (-RJ) |
- |
- |
| HG-JR22K1M4 |
MR-J4-22KGF4 (-RJ), MR-J4-22KB4 (-RJ),
MR-J4-DU22KB4 (-RJ), MR-J4-22KA4 (-RJ) |
- |
- |
| HG-JR30K1M4 |
MR-J4-DU30KB4 (-RJ),
MR-J4-DU30KA4 (-RJ) |
- |
- |
| HG-JR37K1M4 |
MR-J4-DU37KB4 (-RJ),
MR-J4-DU37KA4 (-RJ) |
- |
- |
| HG-JR45K1M4 |
MR-J4-DU45KB4 (-RJ),
MR-J4-DU45KA4 (-RJ) |
- |
- |
| HG-JR55K1M4 |
MR-J4-DU55KB4 (-RJ),
MR-J4-DU55KA4 (-RJ) |
- |
- |
Tham khảo " Sự kết hợp của Động cơ Servo với An toàn Chức năng và Bộ khuếch đại Servo (Loại 400 V) " để biết động cơ servo HG-JR công suất cực lớn.
Sự kết hợp của Động cơ Servo quay và Bộ khuếch đại Servo (Loại 48 V DC / 24 V DC)
| Động cơ servo quay |
Bộ khuếch đại servo |
| MR-J4 |
MR-J4W2 (Lưu ý 1) |
MR-J4W3 |
HG-AK
loạt |
HG-AK0136 (B) |
MR-J4-03A6 (-RJ) |
MR-J4W2-0303B6 |
- |
| HG-AK0236 (B) |
MR-J4-03A6 (-RJ) |
MR-J4W2-0303B6 |
- |
| HG-AK0336 (B) |
MR-J4-03A6 (-RJ) |
MR-J4W2-0303B6 |
- |
- Ghi chú:
-
Sự kết hợp của Dòng động cơ Servo HG-JR và Bộ khuếch đại Servo (Loại 200 V / 400 V) để tăng Mô-men xoắn cực đại lên 400% Mô-men xoắn định mức
Sự kết hợp sau đây của động cơ servo HG-JR và bộ khuếch đại servo làm tăng mô-men xoắn cực đại từ 300% đến 400% mô-men xoắn định mức.
| Động cơ servo quay |
Bộ khuếch đại servo |
| MR-J4 |
MR-J4W2 (Lưu ý 1) |
MR-J4W3 |
HG-JR
3000 r / min
loạt
(200 V) |
HG-JR53 (B) (Lưu ý 2) |
MR-J4-100GF (-RJ),
MR-J4-100B (-RJ),
MR-J4-100A (-RJ) |
MR-J4W2-1010B |
- |
| HG-JR73 (B) (Lưu ý 2) |
MR-J4-200GF (-RJ),
MR-J4-200B (-RJ),
MR-J4-200A (-RJ) |
- |
- |
| HG-JR103 (B) (Lưu ý 2) |
MR-J4-200GF (-RJ),
MR-J4-200B (-RJ),
MR-J4-200A (-RJ) |
- |
- |
| HG-JR153 (B) |
MR-J4-350GF (-RJ),
MR-J4-350B (-RJ),
MR-J4-350A (-RJ) |
- |
- |
| HG-JR203 (B) |
MR-J4-350GF (-RJ),
MR-J4-350B (-RJ),
MR-J4-350A (-RJ) |
- |
- |
| HG-JR353 (B) |
MR-J4-500GF (-RJ),
MR-J4-500B (-RJ),
MR-J4-500A (-RJ) |
- |
- |
| HG-JR503 (B) |
MR-J4-700GF (-RJ),
MR-J4-700B (-RJ),
MR-J4-DU900B (-RJ),
MR-J4-700A (-RJ) |
- |
- |
HG-JR
3000r / min
loạt
(400 V lớp) |
HG-JR534 (B) |
MR-J4-100GF4 (-RJ),
MR-J4-100B4 (-RJ),
MR-J4-100A4 (-RJ) |
- |
- |
| HG-JR734 (B) |
MR-J4-200GF4 (-RJ),
MR-J4-200B4 (-RJ),
MR-J4-200A4 (-RJ) |
- |
- |
| HG-JR1034 (B) |
MR-J4-200GF4 (-RJ),
MR-J4-200B4 (-RJ),
MR-J4-200A4 (-RJ) |
- |
- |
| HG-JR1534 (B) |
MR-J4-350GF4 (-RJ),
MR-J4-350B4 (-RJ),
MR-J4-350A4 (-RJ) |
- |
- |
| HG-JR2034 (B) |
MR-J4-350GF4 (-RJ),
MR-J4-350B4 (-RJ),
MR-J4-350A4 (-RJ) |
|
|
| HG-JR3534 (B) |
MR-J4-500GF4 (-RJ),
MR-J4-500B4 (-RJ),
MR-J4-500A4 (-RJ) |
|
|
| HG-JR5034 (B) |
MR-J4-700GF4 (-RJ),
MR-J4-700B4 (-RJ),
MR-J4-DU900B4 (-RJ),
MR-J4-700A4 (-RJ) |
|
|
- Ghi chú:
-
Kết hợp để tăng mô-men xoắn cực đại (Loại 200 V / 400 V)
Với sự kết hợp sau đây của động cơ servo và bộ truyền động, mô-men xoắn cực đại của động cơ servo có thể được tăng lên khi bật thông số "Lựa chọn chức năng tăng mô-men xoắn cực đại với bộ truyền động".
| Động cơ servo quay |
Đơn vị lái xe |
| Dòng HG-SR |
HG-SR702 (B) |
MR-J4-DU900B (-RJ) |
| HG-SR7024 (B) |
MR-J4-DU900B4 (-RJ) |
| Dòng HG-JR |
HG-JR703 (B) |
MR-J4-DU900B (-RJ) |
| HG-SR701M (B) |
MR-J4-DU900B (-RJ) |
| HG-JR7034 (B) |
MR-J4-DU900B4 (-RJ) |
| HG-SR701M4 (B) |
MR-J4-DU900B4 (-RJ) |
Sự kết hợp của Động cơ Servo với An toàn Chức năng và Bộ khuếch đại Servo (Loại 200 V / 100 V)
Chức năng phụ an toàn có thể được mở rộng với sự kết hợp của động cơ servo với chức năng an toàn, MR-J4-GF-RJ / MR-J4-B-RJ / MR-J4-A-RJ bộ khuếch đại servo và chức năng MR-D30 đơn vị an toàn. Các động cơ servo với chức năng an toàn có sẵn trong dòng HG-KR / HG-SR / HG-JR.
Các thông số kỹ thuật và kích thước của động cơ servo có chức năng an toàn giống như tiêu chuẩn. Kết hợp MR-D30 với các bộ khuếch đại servo sau để mở rộng chức năng phụ an toàn bằng cách sử dụng động cơ servo có chức năng an toàn.
| Động cơ servo với chức năng an toàn |
Bộ khuếch đại servo |
| MR-J4 |
MR-J4W2 |
MR-J4W3 |
| HG-KR053 (B) W0C |
MR-J4-10GF-RJ, MR-J4-10GF1-RJ,
MR-J4-10B-RJ, MR-J4-10B1-RJ,
MR-J4-10A-RJ, MR-J4-10A1-RJ |
- |
- |
| HG-KR13 (B) W0C |
MR-J4-10GF-RJ, MR-J4-10GF1-RJ,
MR-J4-10B-RJ, MR-J4-10B1-RJ,
MR-J4-10A-RJ, MR-J4-10A1-RJ |
- |
- |
| HG-KR23 (B) W0C |
MR-J4-20GF-RJ, MR-J4-20GF1-RJ,
MR-J4-20B-RJ, MR-J4-20B1-RJ,
MR-J4-20A-RJ, MR-J4-20A1-RJ |
- |
- |
| HG-KR43 (B) W0C |
MR-J4-40GF-RJ, MR-J4-40GF1-RJ,
MR-J4-40B-RJ, MR-J4-40B1-RJ,
MR-J4-40A-RJ, MR-J4-40A1-RJ |
- |
- |
| HG-KR73 (B) W0C |
MR-J4-70GF-RJ, MR-J4-70B-RJ,
MR-J4-70A-RJ |
- |
- |
| HG-SR51 (B) W0C |
MR-J4-60GF-RJ, MR-J4-60B-RJ,
MR-J4-60A-RJ |
- |
- |
| HG-SR81 (B) W0C |
MR-J4-100GF-RJ, MR-J4-100B-RJ,
MR-J4-100A-RJ |
- |
- |
| HG-SR121 (B) W0C |
MR-J4-200GF-RJ, MR-J4-200B-RJ,
MR-J4-200A-RJ |
- |
- |
| HG-SR201 (B) W0C |
MR-J4-200GF-RJ, MR-J4-200B-RJ,
MR-J4-200A-RJ |
- |
- |
| HG-SR301 (B) W0C |
MR-J4-350GF-RJ, MR-J4-350B-RJ,
MR-J4-350A-RJ |
- |
- |
| HG-SR421 (B) W0C |
MR-J4-500GF-RJ, MR-J4-500B-RJ,
MR-J4-500A-RJ |
- |
- |
| HG-SR52 (B) W0C |
MR-J4-60GF-RJ, MR-J4-60B-RJ,
MR-J4-60A-RJ |
- |
- |
| HG-SR102 (B) W0C |
MR-J4-100GF-RJ, MR-J4-100B-RJ,
MR-J4-100A-RJ |
- |
- |
| HG-SR152 (B) W0C |
MR-J4-200GF-RJ, MR-J4-200B-RJ,
MR-J4-200A-RJ |
- |
- |
| HG-SR202 (B) W0C |
MR-J4-200GF-RJ, MR-J4-200B-RJ,
MR-J4-200A-RJ |
- |
- |
| HG-SR352 (B) W0C |
MR-J4-350GF-RJ, MR-J4-350B-RJ,
MR-J4-350A-RJ |
- |
- |
| HG-SR502 (B) W0C |
MR-J4-500GF-RJ, MR-J4-500B-RJ,
MR-J4-500A-RJ |
- |
- |
| HG-SR702 (B) W0C |
MR-J4-700GF-RJ, MR-J4-700B-RJ,
MR-J4-DU900B-RJ (Lưu ý 3) , MR-J4-700A-RJ |
- |
- |
| HG-JR53 (B) W0C |
MR-J4-60GF-RJ, MR-J4-100GF-RJ (Chú thích 1, 2) ,
MR-J4-60B-RJ, MR-J4-100B-RJ (Chú thích 1, 2) ,
MR-J4-60A- RJ, MR-J4-100A-RJ (Chú thích 1, 2) |
- |
- |
| HG-JR73 (B) W0C |
MR-J4-70GF-RJ, MR-J4-200GF-RJ (Chú thích 1, 2) ,
MR-J4-70B-RJ, MR-J4-200B-RJ (Chú thích 1, 2) ,
MR-J4-70A- RJ, MR-J4-200A-RJ (Chú thích 1, 2) |
- |
- |
| HG-JR103 (B) W0C |
MR-J4-100GF-RJ, MR-J4-200GF-RJ (Chú thích 1, 2) ,
MR-J4-100B-RJ, MR-J4-200B-RJ (Chú thích 1, 2) ,
MR-J4-100A- RJ, MR-J4-200A-RJ (Chú thích 1, 2) |
- |
- |
| HG-JR153 (B) W0C |
MR-J4-200GF-RJ, MR-J4-350GF-RJ (Chú thích 1) ,
MR-J4-200B-RJ, MR-J4-350B-RJ (Chú thích 1) ,
MR-J4-200A-RJ, MR- J4-350A-RJ (Lưu ý 1) |
- |
- |
| HG-JR203 (B) W0C |
MR-J4-200GF-RJ, MR-J4-350GF-RJ (Chú thích 1) ,
MR-J4-200B-RJ, MR-J4-350B-RJ (Chú thích 1) ,
MR-J4-200A-RJ, MR- J4-350A-RJ (Lưu ý 1) |
- |
- |
| HG-JR353 (B) W0C |
MR-J4-350GF-RJ, MR-J4-500GF-RJ (Chú thích 1) ,
MR-J4-350B-RJ, MR-J4-500B-RJ (Chú thích 1) ,
MR-J4-350A-RJ, MR- J4-500A-RJ (Lưu ý 1) |
- |
- |
| HG-JR503 (B) W0C |
MR-J4-500GF-RJ, MR-J4-700GF-RJ (Lưu ý 1) ,
MR-J4-500B-RJ, MR-J4-700B-RJ (Lưu ý 1) ,
MR-J4-DU900B-RJ (Lưu ý 1) ) , MR-J4-500A-RJ,
MR-J4-700A-RJ (Chú thích 1) |
- |
- |
| HG-JR703 (B) W0C |
MR-J4-700GF-RJ, MR-J4-700B-RJ,
MR-J4-DU900B-RJ (Lưu ý 3) , MR-J4-700A-RJ |
- |
- |
| HG-JR903 (B) W0C |
MR-J4-11KGF-RJ, MR-J4-11KB-RJ,
MR-J4-DU900B (-RJ), MR-J4-11KA-RJ |
- |
- |
| HG-JR701M (B) W0C |
MR-J4-700GF-RJ, MR-J4-700B-RJ,
MR-J4-DU900B-RJ (Lưu ý 3) , MR-J4-700A-RJ |
- |
- |
| HG-JR11K1M (B) W0C |
MR-J4-11KGF-RJ, MR-J4-11KB-RJ,
MR-J4-DU11KB-RJ, MR-J4-11KA-RJ |
- |
- |
| HG-JR15K1M (B) W0C |
MR-J4-15KGF-RJ, MR-J4-15KB-RJ,
MR-J4-DU15KB-RJ, MR-J4-15KA-RJ |
- |
- |
| HG-JR22K1MW0C |
MR-J4-22KGF-RJ, MR-J4-22KB-RJ,
MR-J4-DU22KB-RJ, MR-J4-22KA-RJ |
- |
- |
- Ghi chú:
- Sự kết hợp này làm tăng mô-men xoắn cực đại từ 300% đến 400% mô-men xoắn định mức.
- Khi sử dụng đầu vào 1 pha 200 V AC, không thể tăng mô-men xoắn cực đại lên 400% với loạt động cơ servo HG-JR.
- Mô-men xoắn cực đại có thể được tăng lên khi "Lựa chọn chức năng tăng mô-men xoắn cực đại với bộ truyền động" được bật với một tham số.
-
Sự kết hợp của Động cơ Servo với An toàn Chức năng và Bộ khuếch đại Servo (Loại 400 V)
| Động cơ servo với chức năng an toàn |
Bộ khuếch đại servo |
| MR-J4 |
MR-J4W2 |
MR-J4W3 |
| HG-SR524 (B) W0C |
MR-J4-60GF4-RJ, MR-J4-60B4-RJ,
MR-J4-60A4-RJ |
- |
- |
| HG-SR1024 (B) W0C |
MR-J4-100GF4-RJ, MR-J4-100B4-RJ,
MR-J4-100A4-RJ |
- |
- |
| HG-SR1524 (B) W0C |
MR-J4-200GF4-RJ, MR-J4-200B4-RJ,
MR-J4-200A4-RJ |
- |
- |
| HG-SR2024 (B) W0C |
MR-J4-200GF4-RJ, MR-J4-200B4-RJ,
MR-J4-200A4-RJ |
- |
- |
| HG-SR3524 (B) W0C |
MR-J4-350GF4-RJ, MR-J4-350B4-RJ,
MR-J4-350A4-RJ |
- |
- |
| HG-SR5024 (B) W0C |
MR-J4-500GF4-RJ, MR-J4-500B4-RJ,
MR-J4-500A4-RJ |
- |
- |
| HG-SR7024 (B) W0C |
MR-J4-700GF4-RJ, MR-J4-700B4-RJ,
MR-J4-DU900B4-RJ (Lưu ý 2) , MR-J4-700A4-RJ |
- |
- |
| HG-JR534 (B) W0C |
MR-J4-60GF4-RJ, MR-J4-100GF4-RJ (Chú thích 1) ,
MR-J4-60B4-RJ, MR-J4-100B4-RJ (Chú thích 1) ,
MR-J4-60A4-RJ, MR- J4-100A4-RJ (Lưu ý 1) |
- |
- |
| HG-JR734 (B) W0C |
MR-J4-100GF4-RJ, MR-J4-200GF4-RJ (Chú thích 1) ,
MR-J4-100B4-RJ, MR-J4-200B4-RJ (Chú thích 1) ,
MR-J4-100A4-RJ, MR- J4-200A4-RJ (Lưu ý 1) |
- |
- |
| HG-JR1034 (B) W0C |
MR-J4-100GF4-RJ, MR-J4-200GF4-RJ (Chú thích 1) ,
MR-J4-100B4-RJ, MR-J4-200B4-RJ (Chú thích 1) ,
MR-J4-100A4-RJ, MR- J4-200A4-RJ (Lưu ý 1) |
- |
- |
| HG-JR1534 (B) W0C |
MR-J4-200GF4-RJ, MR-J4-350GF4-RJ (Chú thích 1) ,
MR-J4-200B4-RJ, MR-J4-350B4-RJ (Chú thích 1) ,
MR-J4-200A4-RJ, MR- J4-350A4-RJ (Lưu ý 1) |
- |
- |
| HG-JR2034 (B) W0C |
MR-J4-200GF4-RJ, MR-J4-350GF4-RJ (Chú thích 1) ,
MR-J4-200B4-RJ, MR-J4-350B4-RJ (Chú thích 1) ,
MR-J4-200A4-RJ, MR- J4-350A4-RJ (Lưu ý 1) |
- |
- |
| HG-JR3534 (B) W0C |
MR-J4-350GF4-RJ, MR-J4-500GF4-RJ (Chú thích 1) ,
MR-J4-350B4-RJ, MR-J4-500B4-RJ (Chú thích 1) ,
MR-J4-350A4-RJ, MR- J4-500A4-RJ (Lưu ý 1) |
- |
- |
| HG-JR5034 (B) W0C |
MR-J4-500GF4-RJ, MR-J4-700GF4-RJ (Chú thích 1) ,
MR-J4-500B4-RJ, MR-J4-700B4-RJ (Chú thích 1) ,
MR-J4-DU900B4-RJ (Chú thích 1) ) , MR-J4-500A4-RJ,
MR-J4-700A4-RJ (Chú thích 1) |
- |
- |
| HG-JR7034 (B) W0C |
MR-J4-700GF4-RJ, MR-J4-700B4-RJ,
MR-J4-DU900B4-RJ (Lưu ý 2) , MR-J4-700A4-RJ |
- |
- |
| HG-JR9034 (B) W0C |
MR-J4-11KGF4-RJ, MR-J4-11KB4-RJ,
MR-J4-DU900B4-RJ, MR-J4-11KA4-RJ |
- |
- |
| HG-JR701M4 (B) W0C |
MR-J4-700GF4-RJ, MR-J4-700B4-RJ,
MR-J4-DU900B4-RJ (Lưu ý 2) , MR-J4-700A4-RJ |
- |
- |
| HG-JR11K1M4 (B) W0C |
MR-J4-11KGF4-RJ, MR-J4-11KB4-RJ,
MR-J4-DU11KB4-RJ, MR-J4-11KA4-RJ |
- |
- |
| HG-JR15K1M4 (B) W0C |
MR-J4-15KGF4-RJ, MR-J4-15KB4-RJ,
MR-J4-DU15KB4-RJ, MR-J4-15KA4-RJ |
- |
- |
| HG-JR22K1M4W0C |
MR-J4-22KGF4-RJ, MR-J4-22KB4-RJ,
MR-J4-DU22KB4-RJ, MR-J4-22KA4-RJ |
- |
- |
- Ghi chú:








![三次 元 板 金 展開 シ ス テ ム CamMagic SMOPlus [SpaceClaimSMOPlus]](https://www.mitsubishielectric.com/fa/products/drv/servo/pmerit/mr_j4/amp/images/mc_i62.jpg)